
![]()
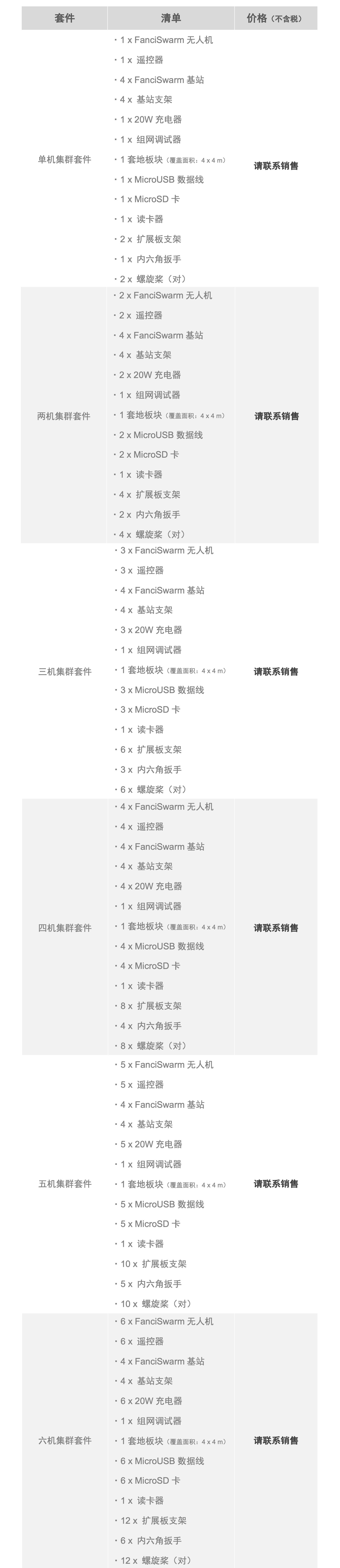
(以五机集群套件为例)
![]()
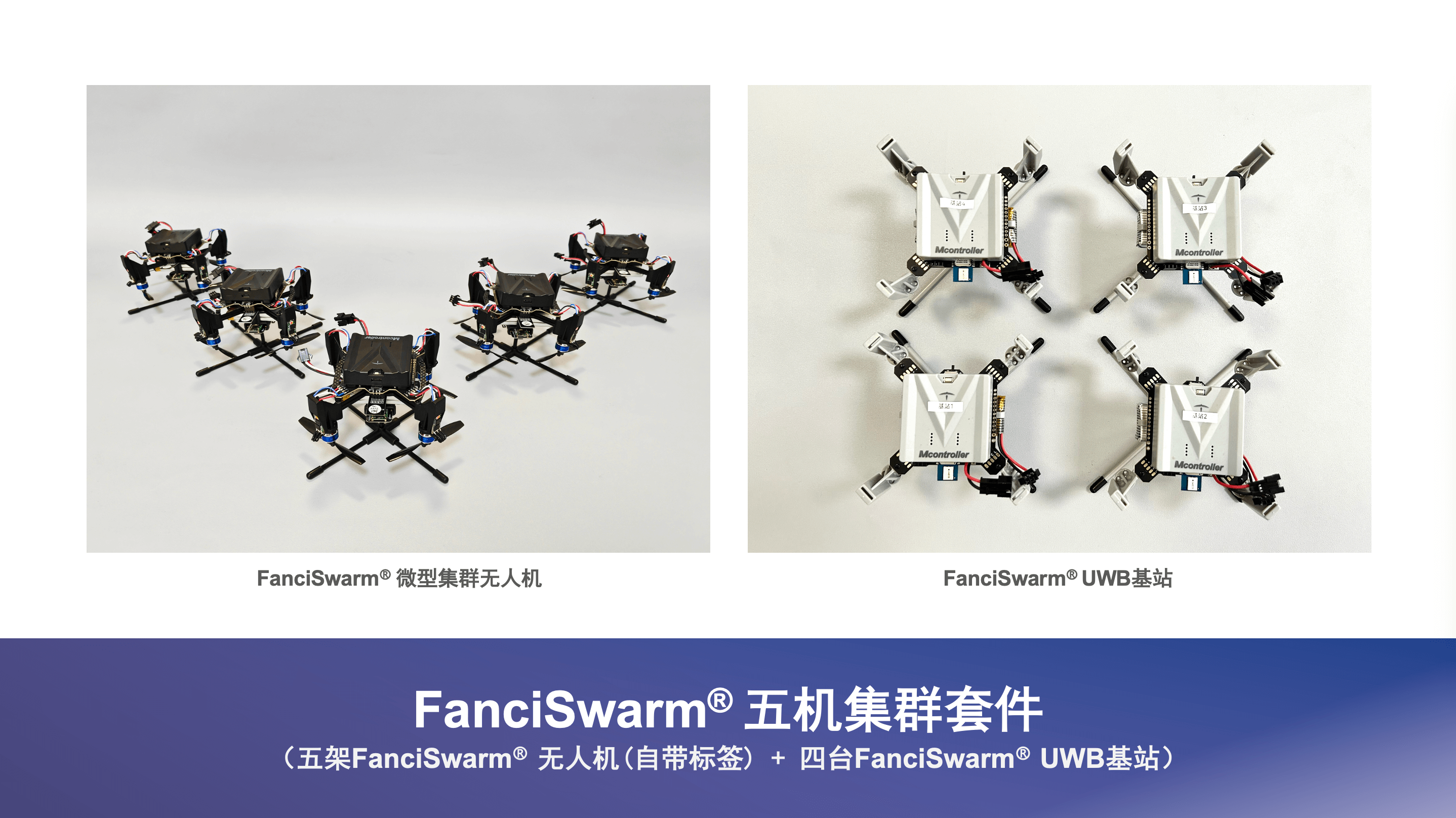
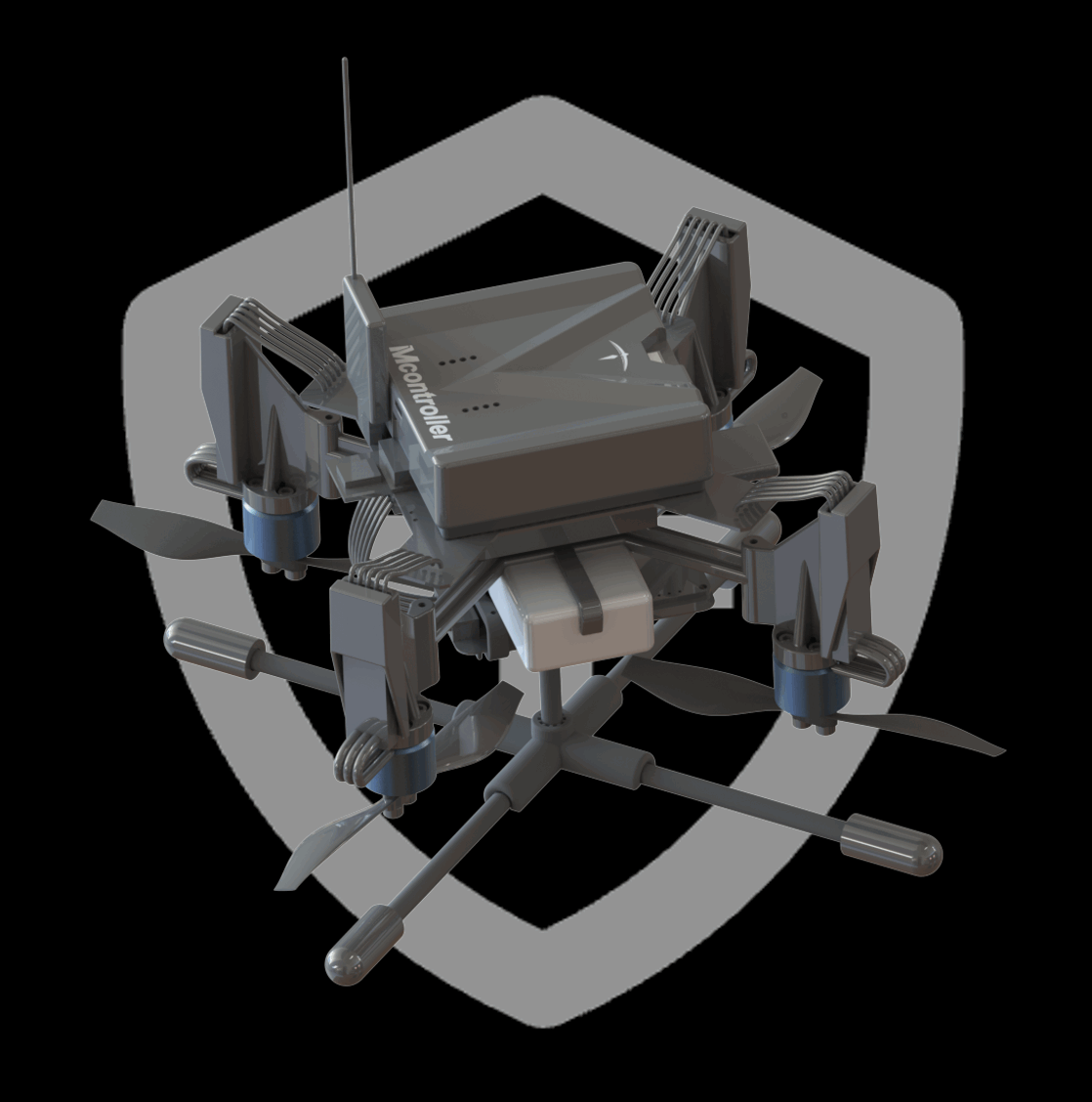
FanciSwarm 集群套件
是什么? FanciSwarm® 集群套件基于 FanciSwarm® 高精度UWB定位系统。该系统是一种基于超宽带无线电技术(Ultra Wideband,简称UWB )的定位系统,用于确定空间中无人机的绝对三维位置(x、y和z坐标)。
如何理解?相较于全球定位系统(北斗或GPS), UWB定位系统是一个本地定位系统,室内室外通用,但是它在许多方面类似于一个微型北斗/GPS系统。
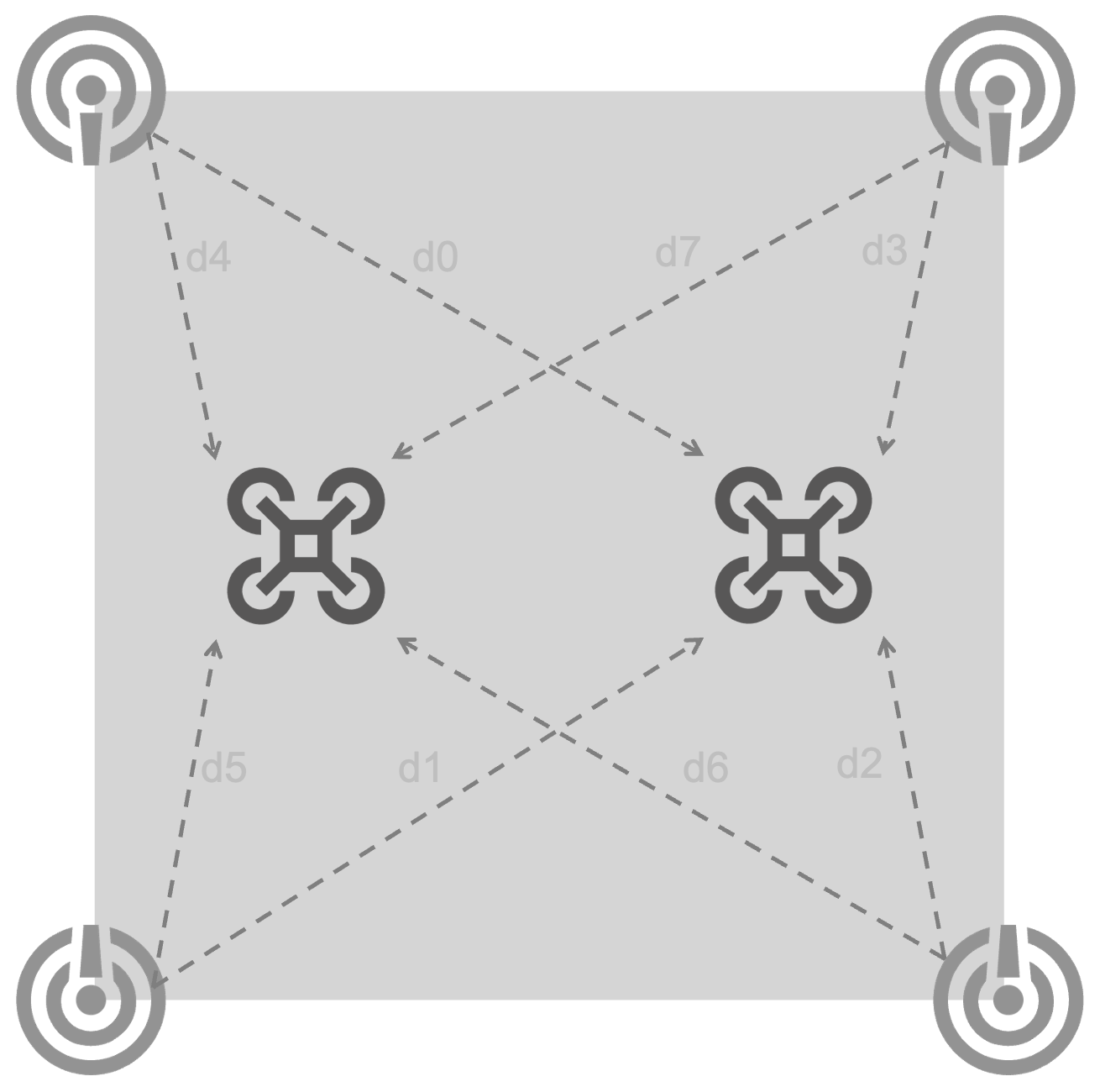
工作原理:通过在基站和无人机(自带标签)之间发送高频无线电信息,测量无人机到每个基站的距离,通过高精度定位算法计算出标签的位置,即无人机在三维空间中的精确坐标。
构成:由4台FanciSwarm™基站、1架或多架FanciSwarm™无人机(自带标签)以及高精度定位算法构成。
作用:FanciSwarm™高精度UWB定位系统赋予了FanciSwarm™无人机极强的精准飞行能力和自主飞行能力,从而极大地拓展了FanciSwarm 无人机的应用,使得FanciSwarm® 集群套件可实现多架无人机的轨迹飞行、编队飞行和集群飞行。
自主可控
能够更充分地满足用户需求

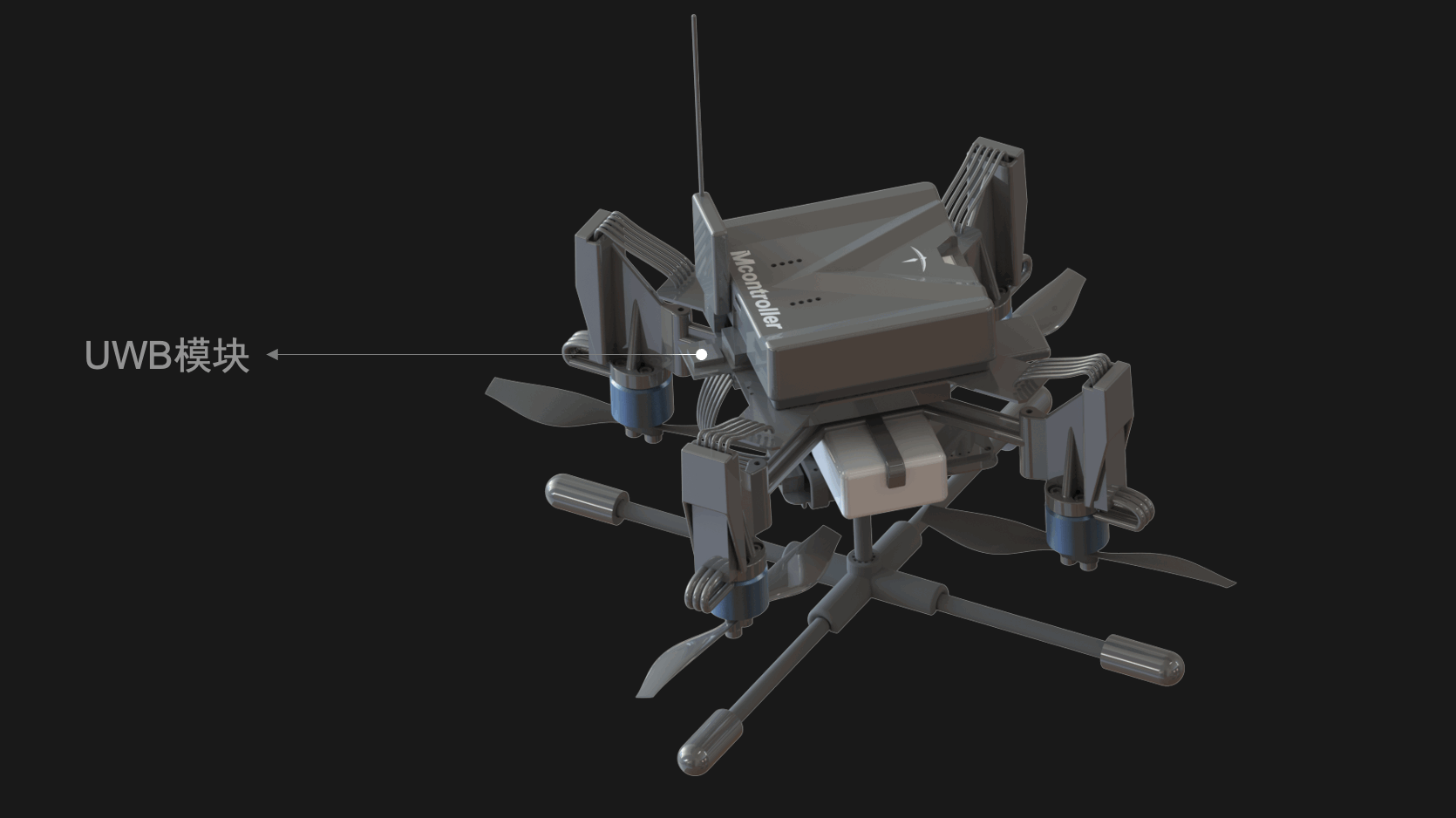
搭载DWM1000模块
精度小于10cm
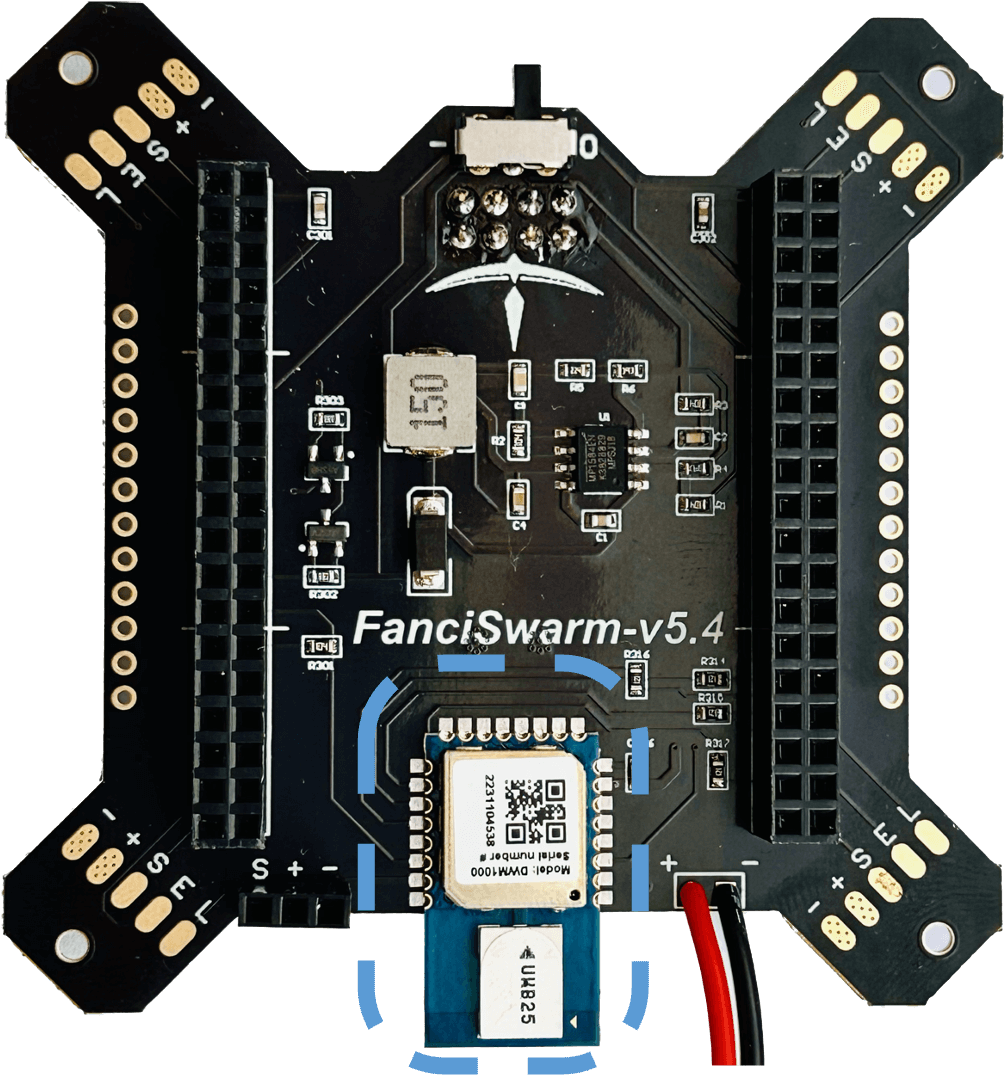
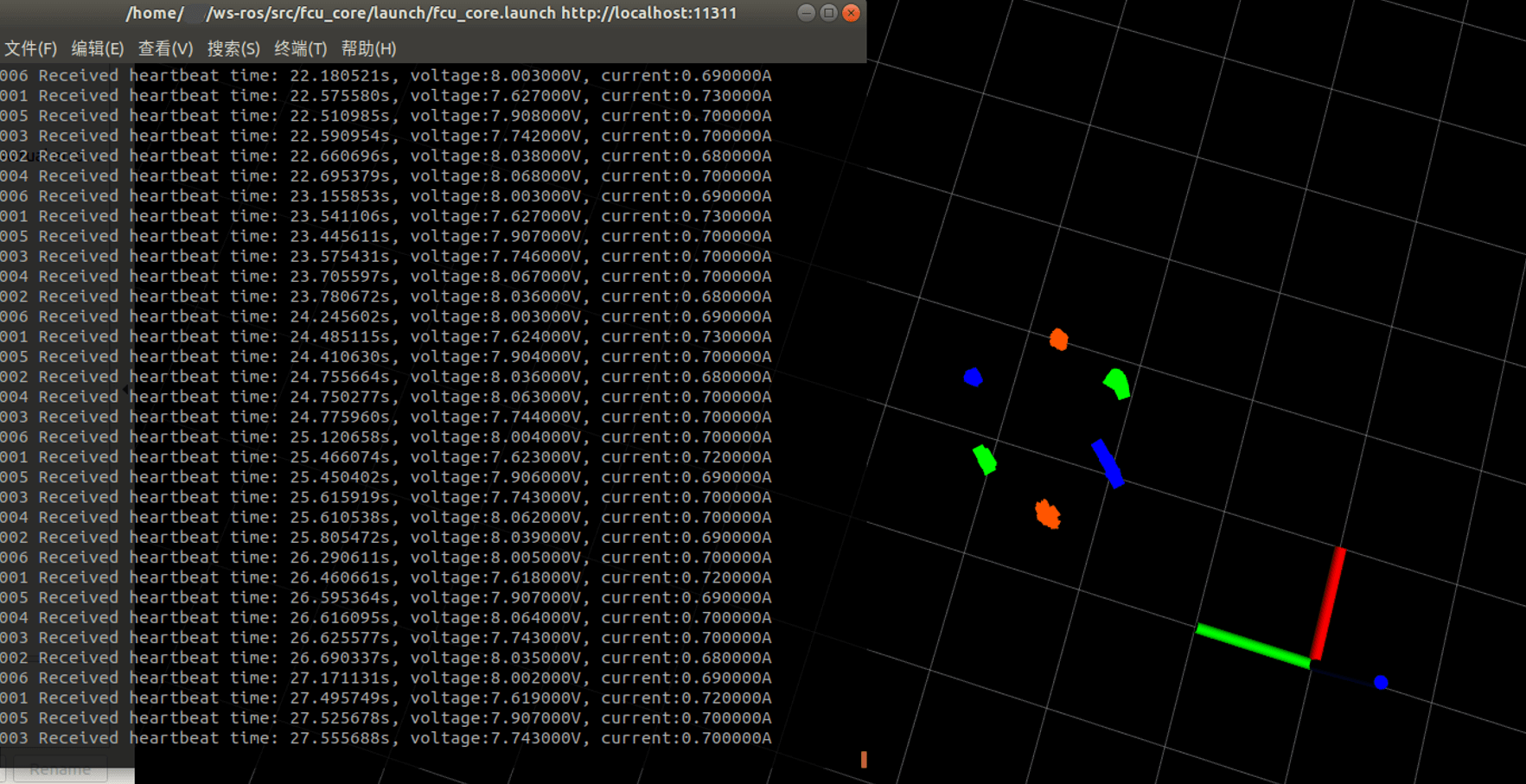
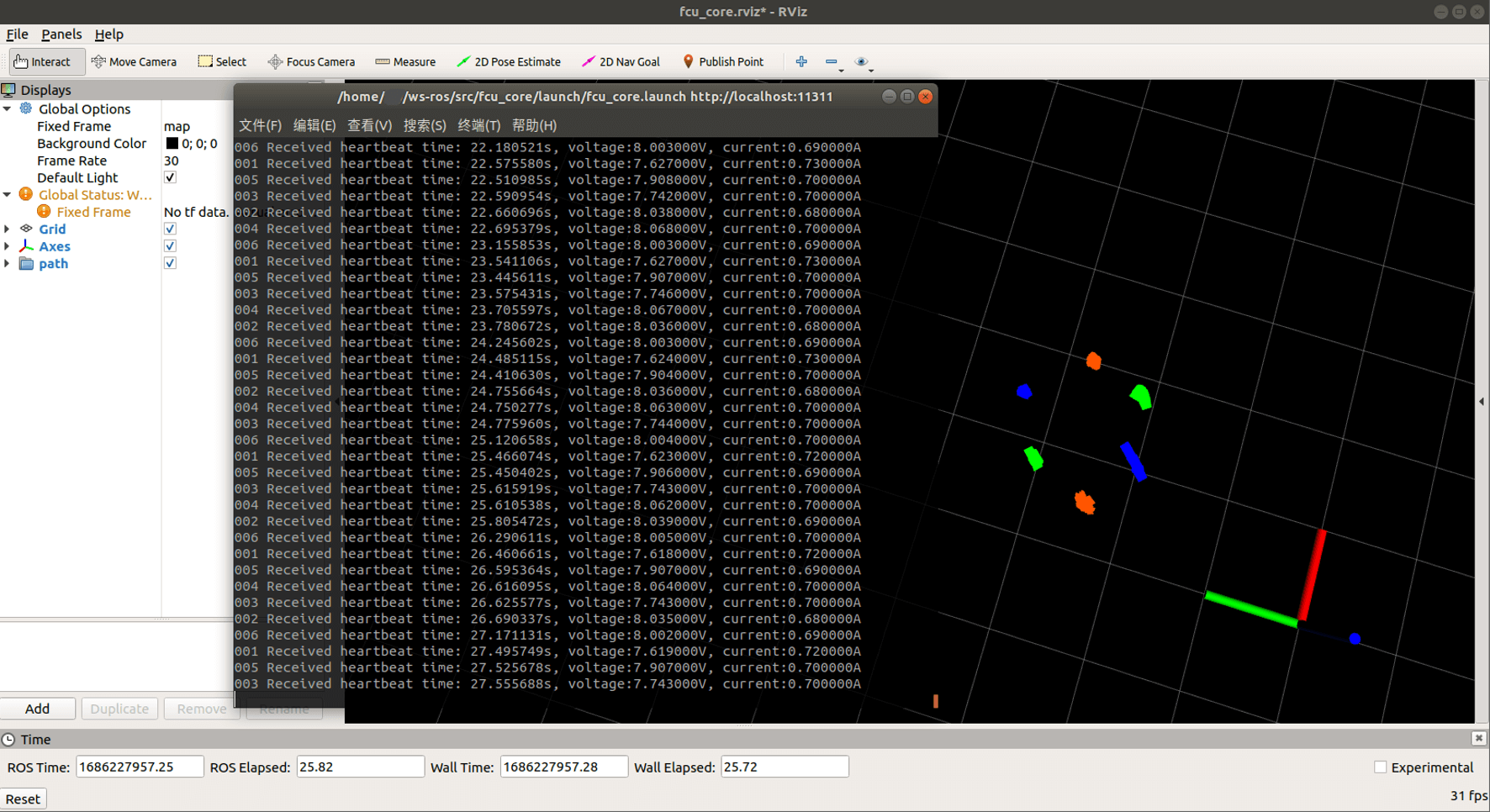
在无人机上实时
进行位置估计
定位系统更稳定 更易扩展
结构更灵活
系统更高效
飞行更安全
一体化
可实时监测每台无人机的状态
集群调度系统
开源
支持二次开发
简单易用 功能强大
快速上手
App快捷调参
五年研发
拥有多项专利技术
全栈自研跨模态系统架构

ZL201910948675.1、ZL202110028122.1、ZL202110020999.6
搭载DWM1000模块 精度小于10cm
定点飞行
定高飞行
轨迹飞行
集群飞行

看家本领
拿手好戏

动作捕捉系统
只需简单配置
就可接入动捕系统
实现更高精度的集群
联系人
幻思创新 - Eisen:131 6166 2599
幻思创新 - Eisen:eisenhe@fancinnov.com
幻思创新 - Jacky:178 0100 5045
幻思创新 - Jacky:jackypan@fancinnov.com
企业微信
邮箱
幻思创新 - 官方:company@fancinnov.com