FanciSwarm® 无人机
FanciSwarm® 无人机 简介
(点击查看详细介绍)
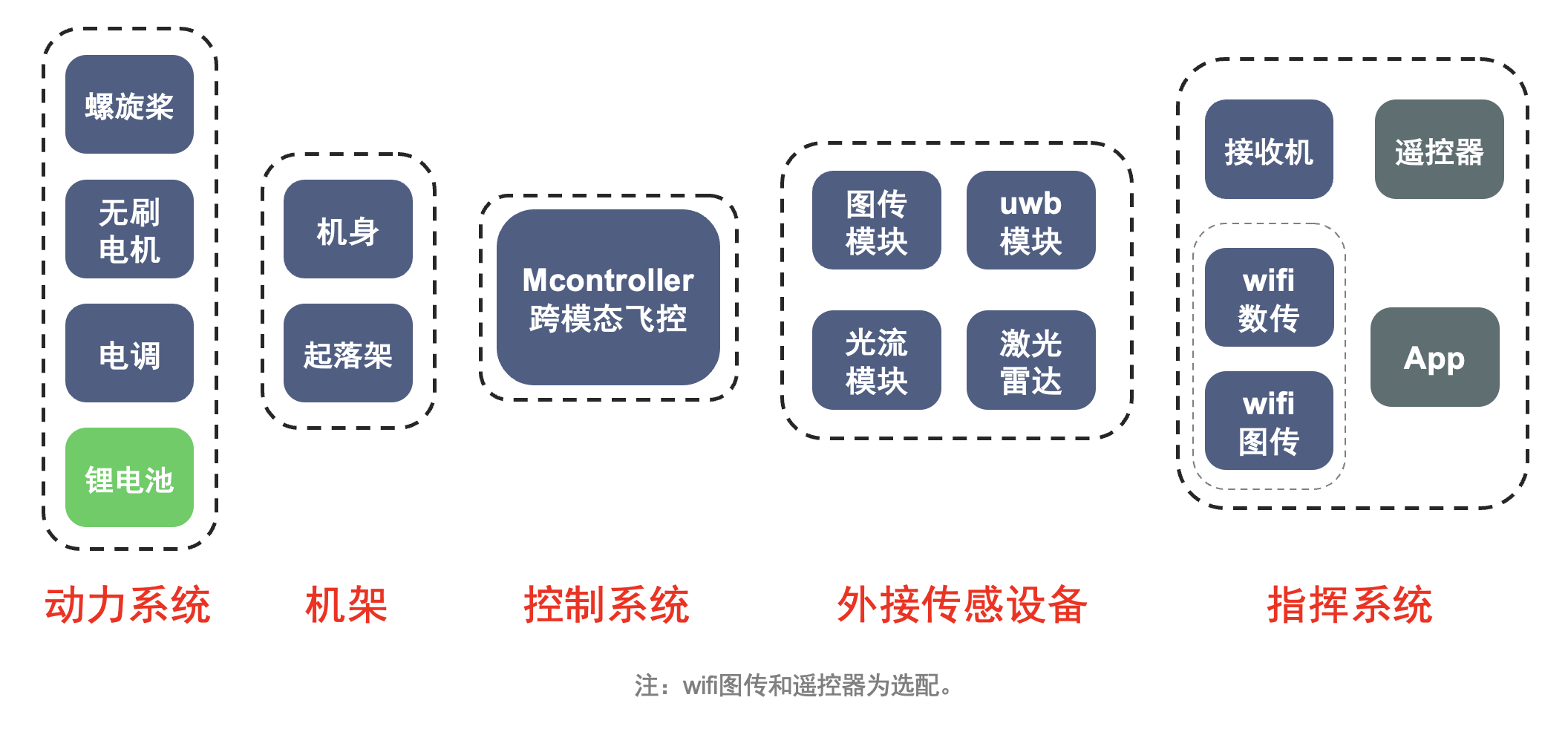
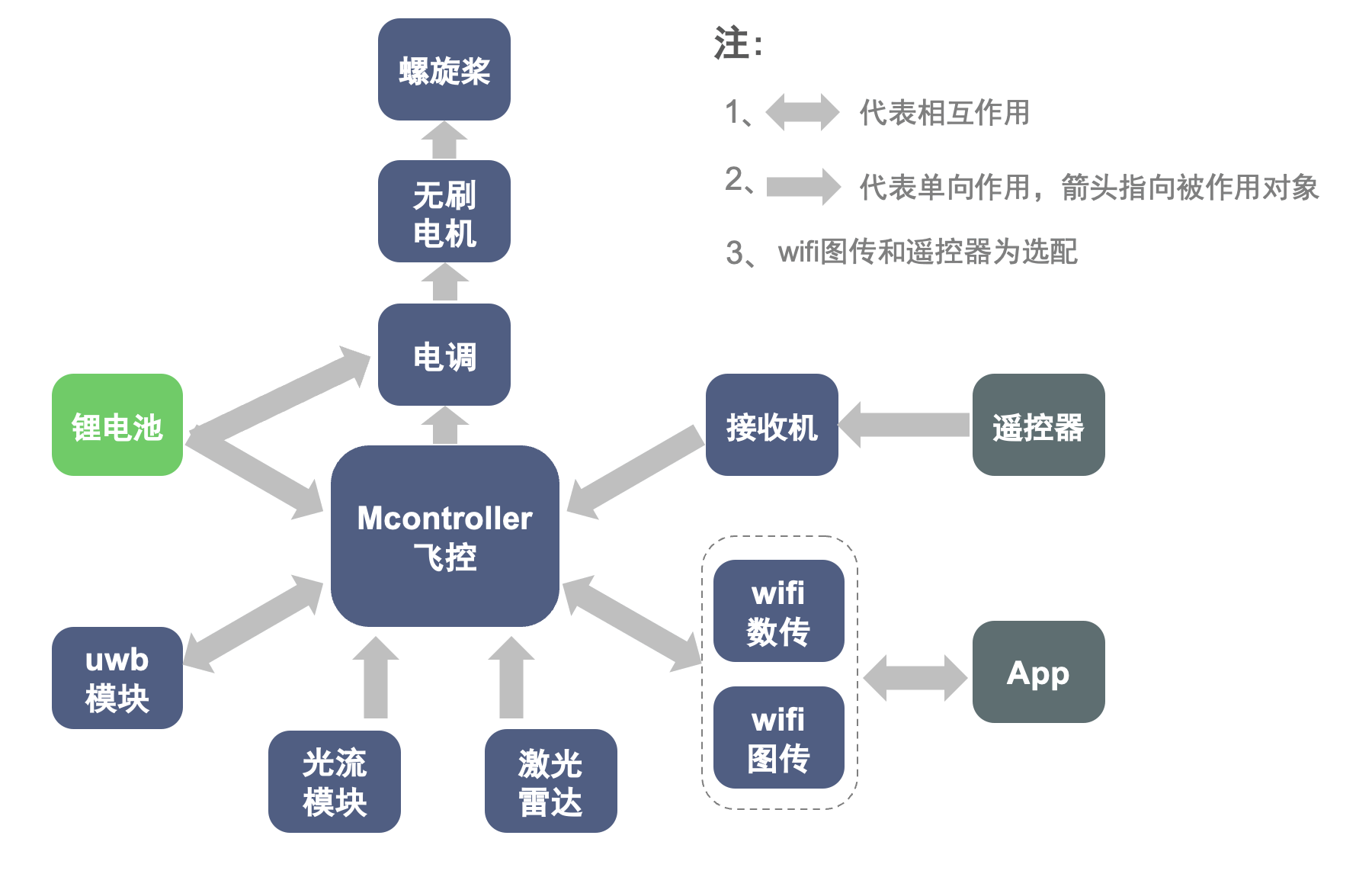
FanciSwarm® 是一款基于全自研的Mcontroller® 跨模态飞控开发的多功能微型集群无人机,专门用于集群、教育和科研。它既可以零开发到手即用,又可以进行简单开发解锁轨迹飞行、集群飞行等更多功能,还可以进行深度开发接入其他硬件实现更多创意。
小身躯,大容量
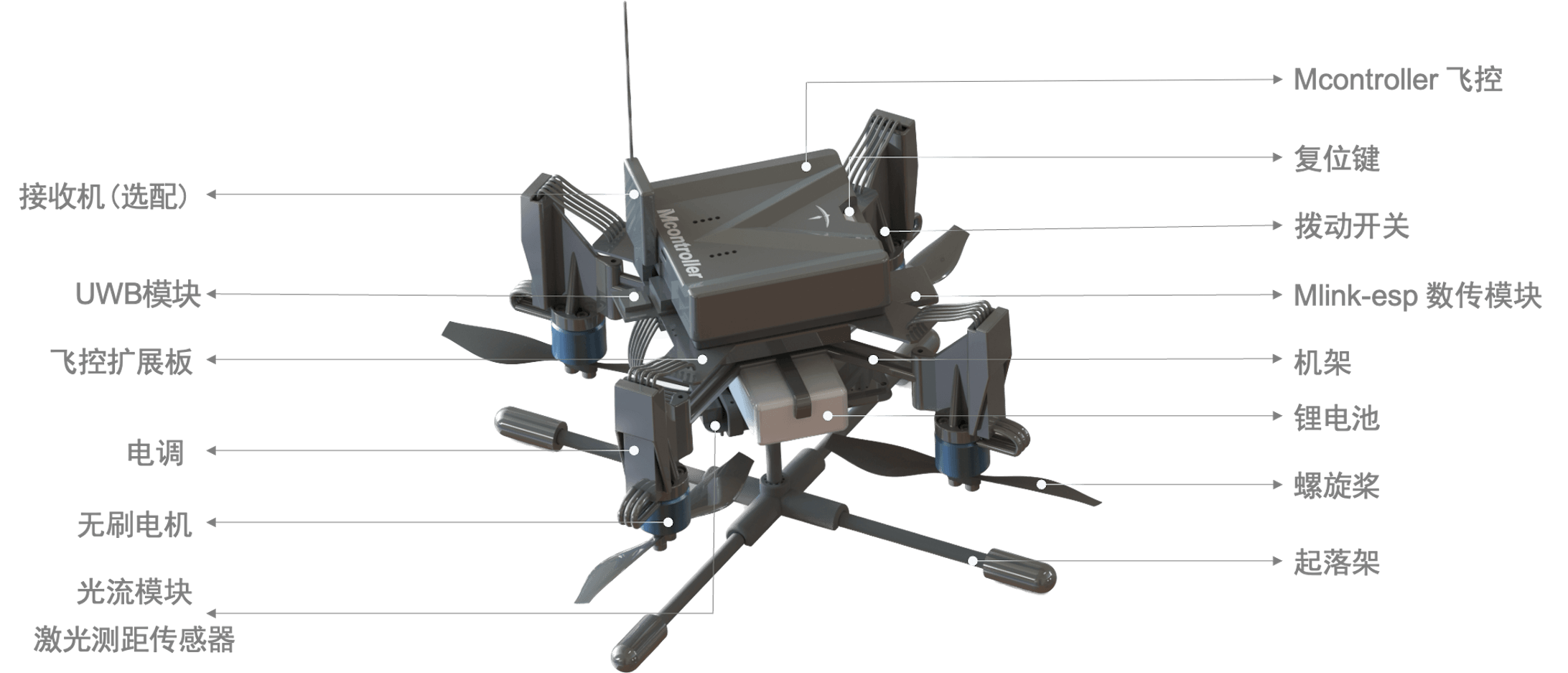
FanciSwarm® 不如你的手掌大,搭载高性能无刷电机,相邻电机间距仅80mm。uwb模块、激光测距模块、光流模块......一应俱全。
分离设计,持久生命力
Mcontroller® 跨模态飞控与FanciSwarm®机体分离设计,插拔即可装卸,可单独复用在其他机器人平台上,焕发新的生机。上百次耐摔实验,核心部件,依然完好无损,可维护性极强。
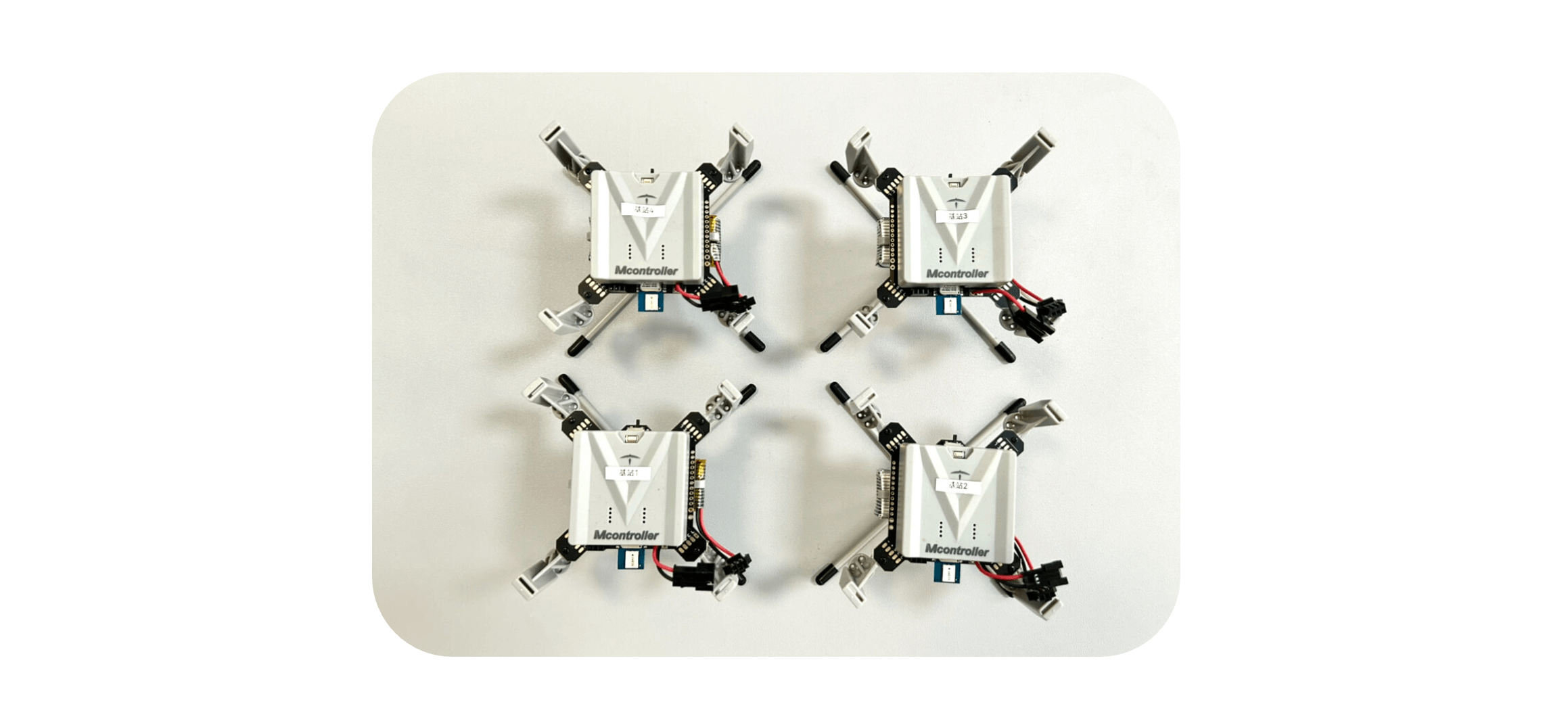
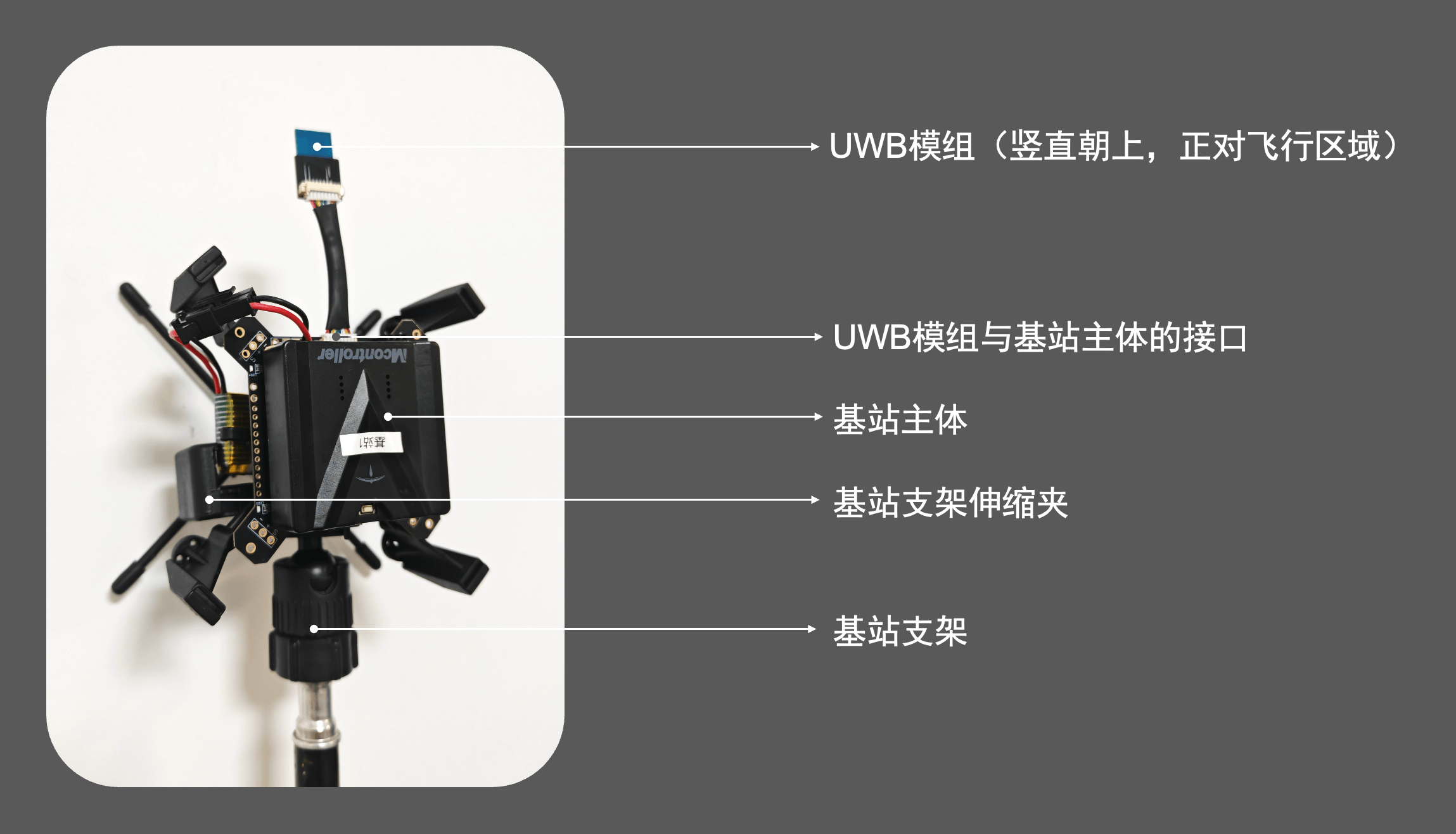
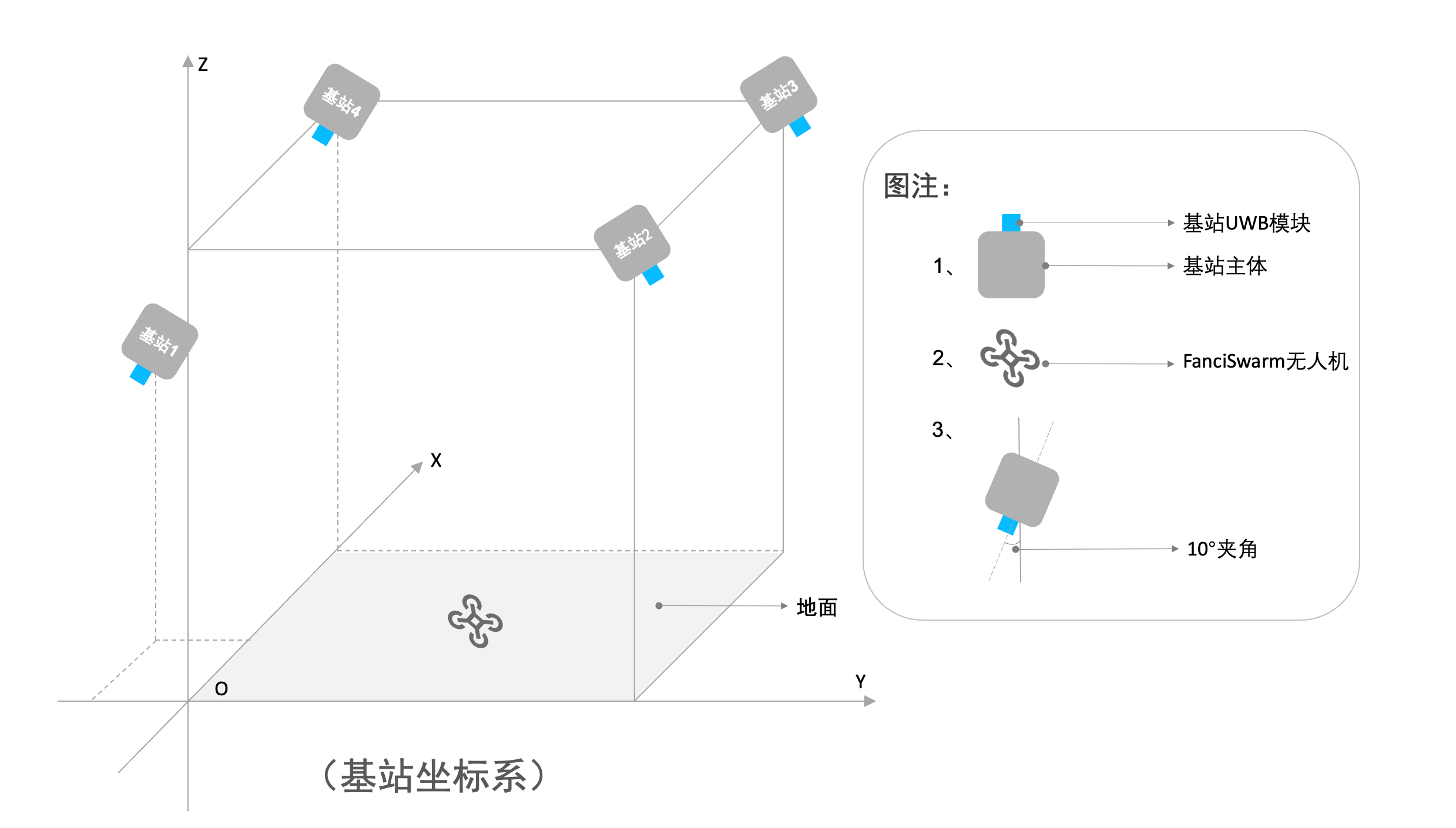
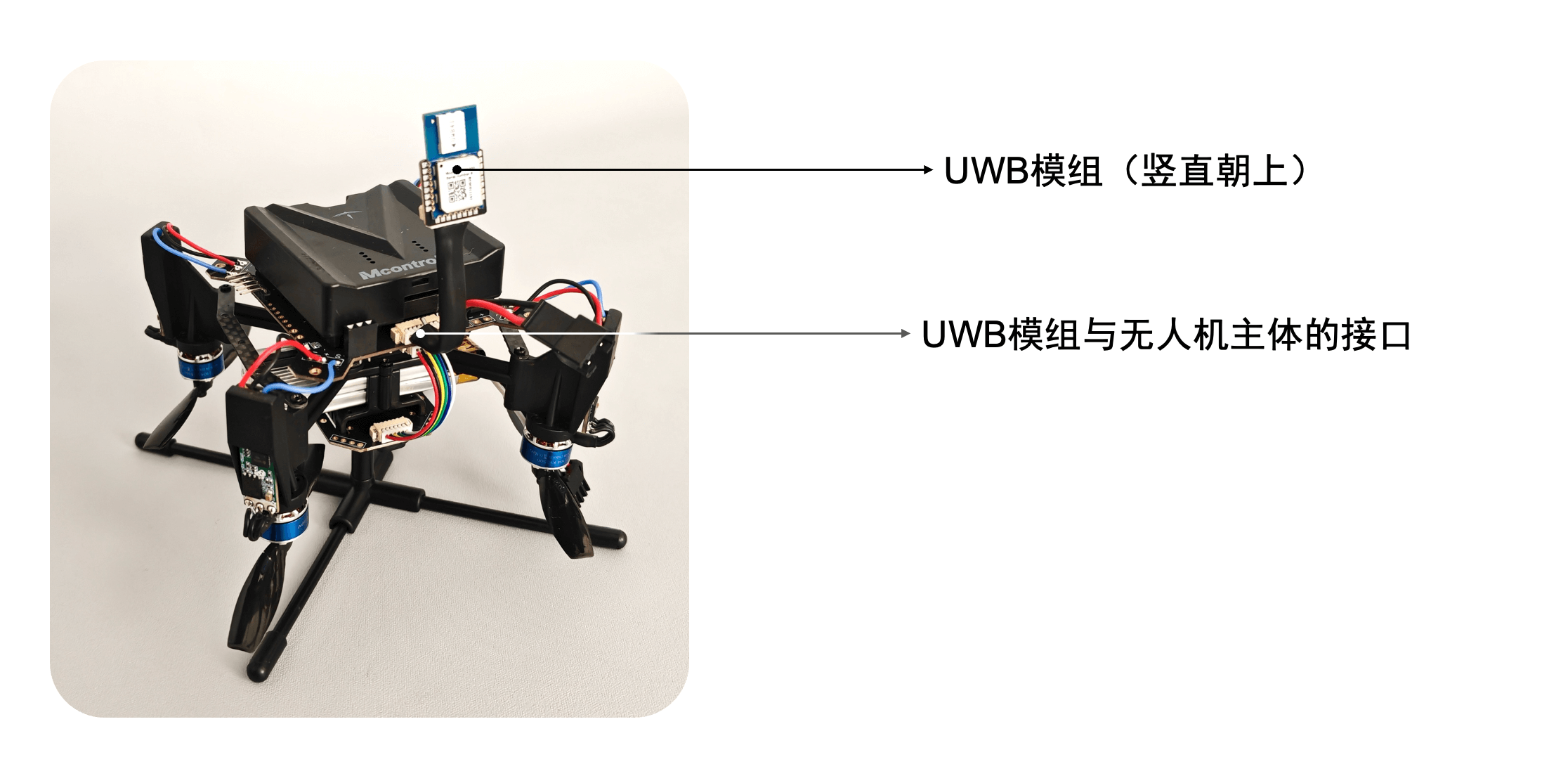
全自研高精度UWB定位系统
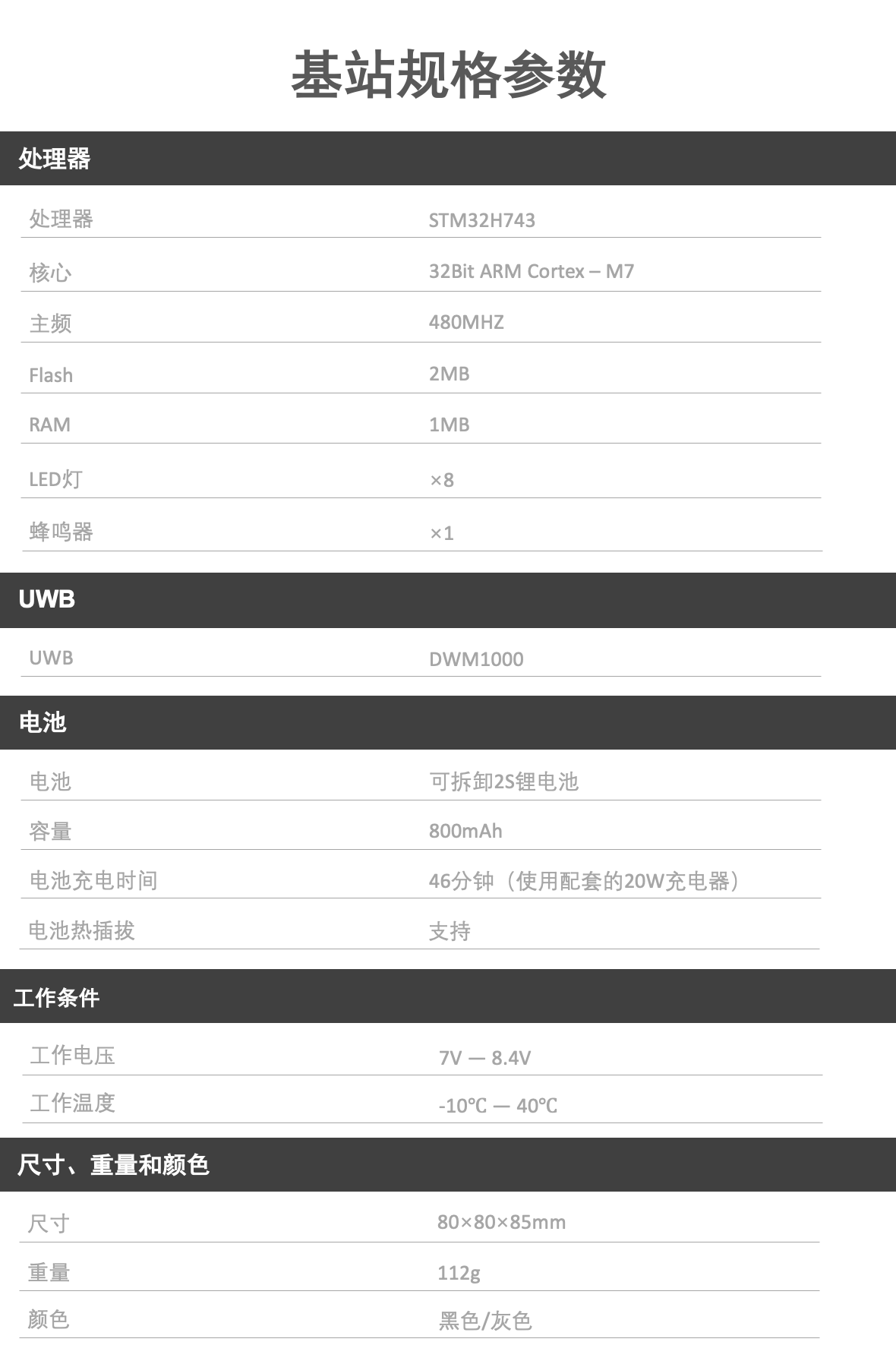
整套系统全自研,搭载DWM1000模块,精度小于10cm(3维定位定位精度取决于系统设置和环境)。采用分布式定位,自组网通信,测距定位通信一体化,并配套集群调度系统,部署简单,快速上手。
飞得稳,飞得更准
FanciSwarm®基于全自研的Mcontroller® 跨模态飞控开发,五年研发,拥有多项专利技术,全自研跨模态系统架构飞得稳;基于FanciSwarm®高精度UWB定位系统,飞得更准。
够安全
基于FanciSwarm®的安全保护机制,撞击保护,自动锁停电机;信号丢失保护,自动下降着陆;电量过低保护,自动下降着陆;最大高度限制。
飞行健将
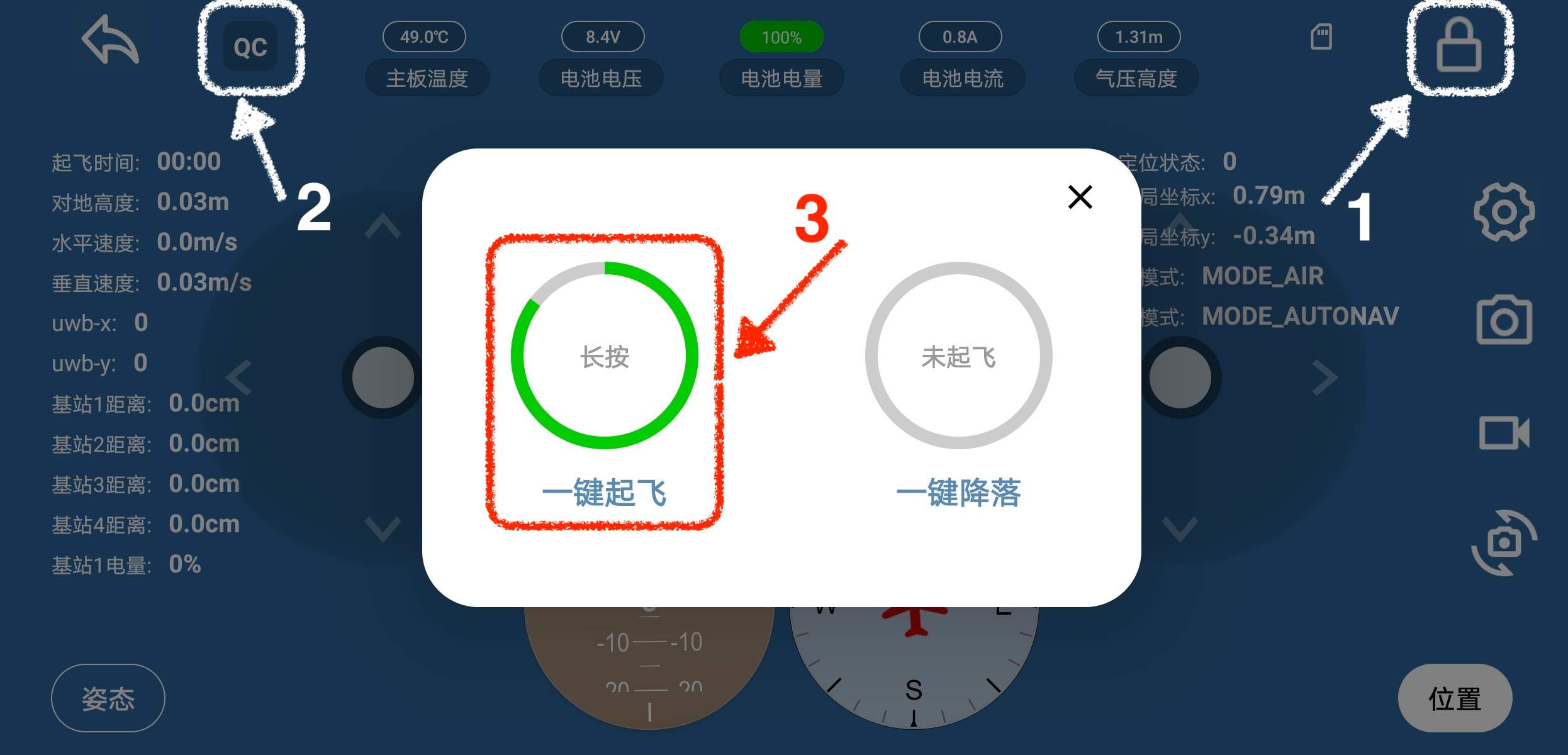
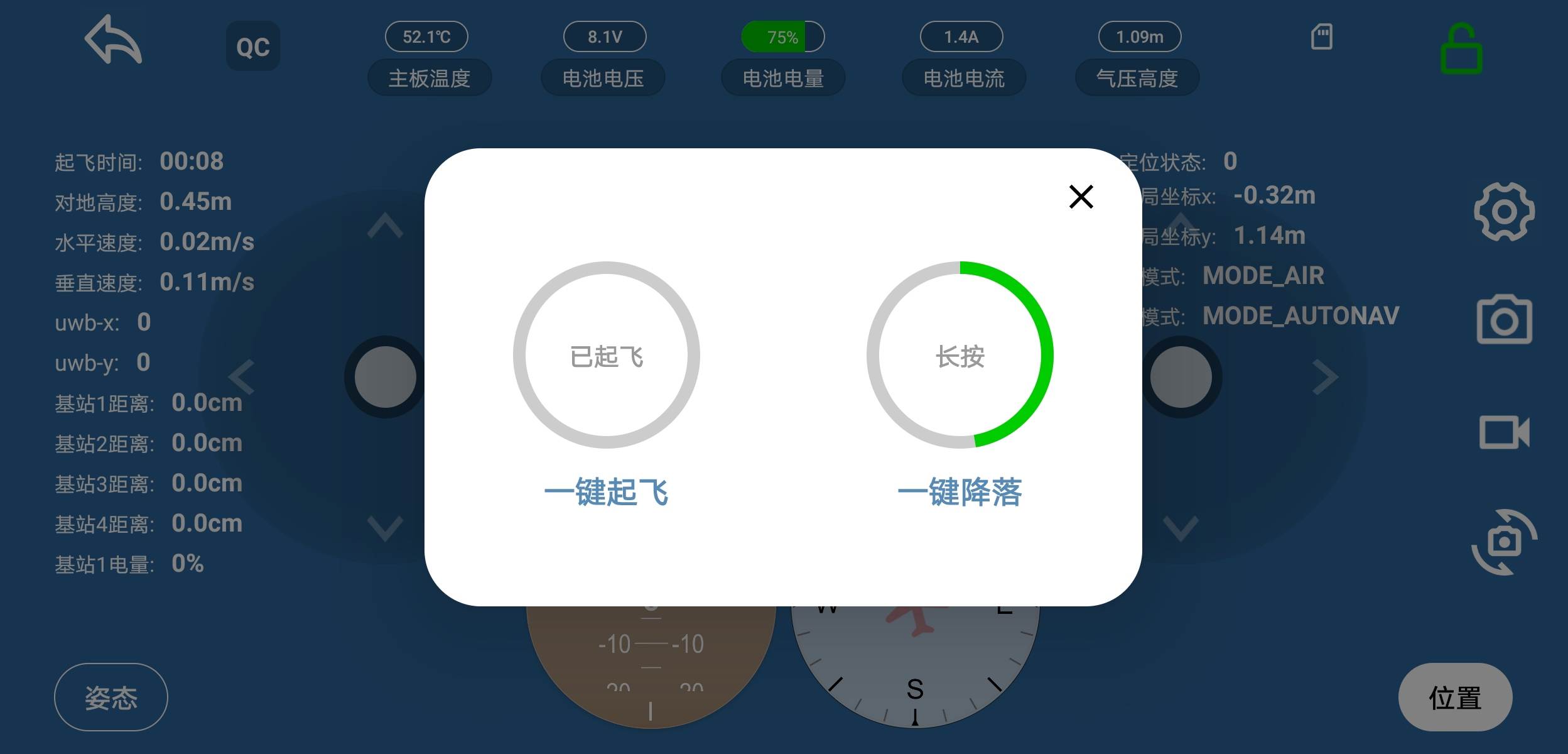
一键起飞、一键降落、定点飞行、定高飞行、轨迹飞行、集群飞行,FanciSwarm®统统可以。光流模块、激光测距模块、UWB模块等丰富的硬件配置以及高效稳定的算法为FanciSwarm®多模式飞行“保驾护航”。
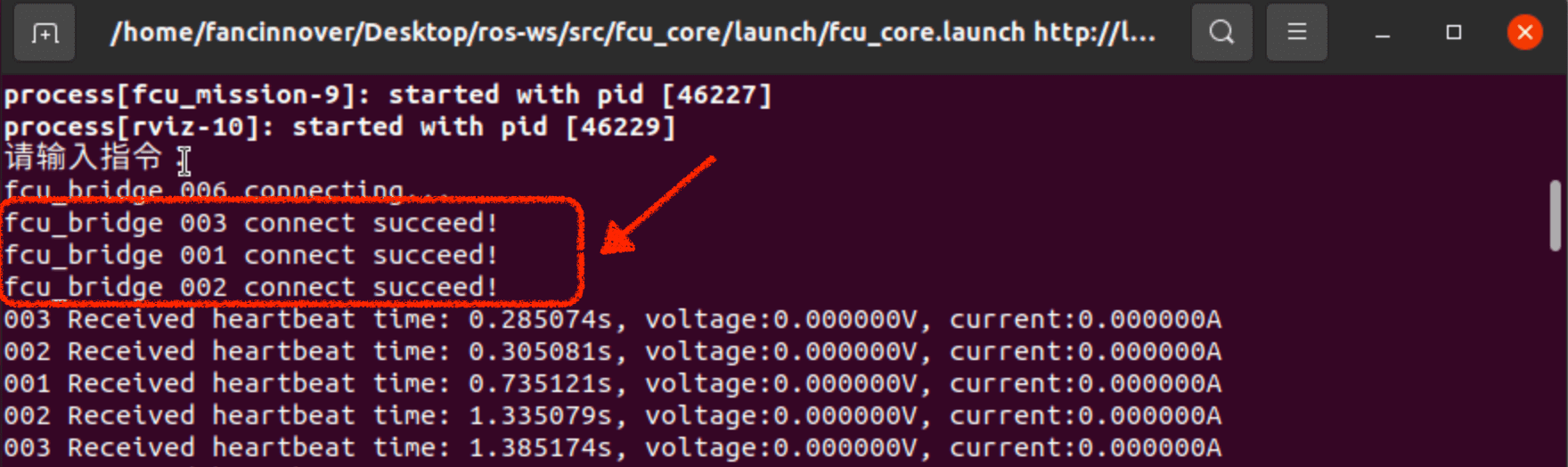
集群飞行
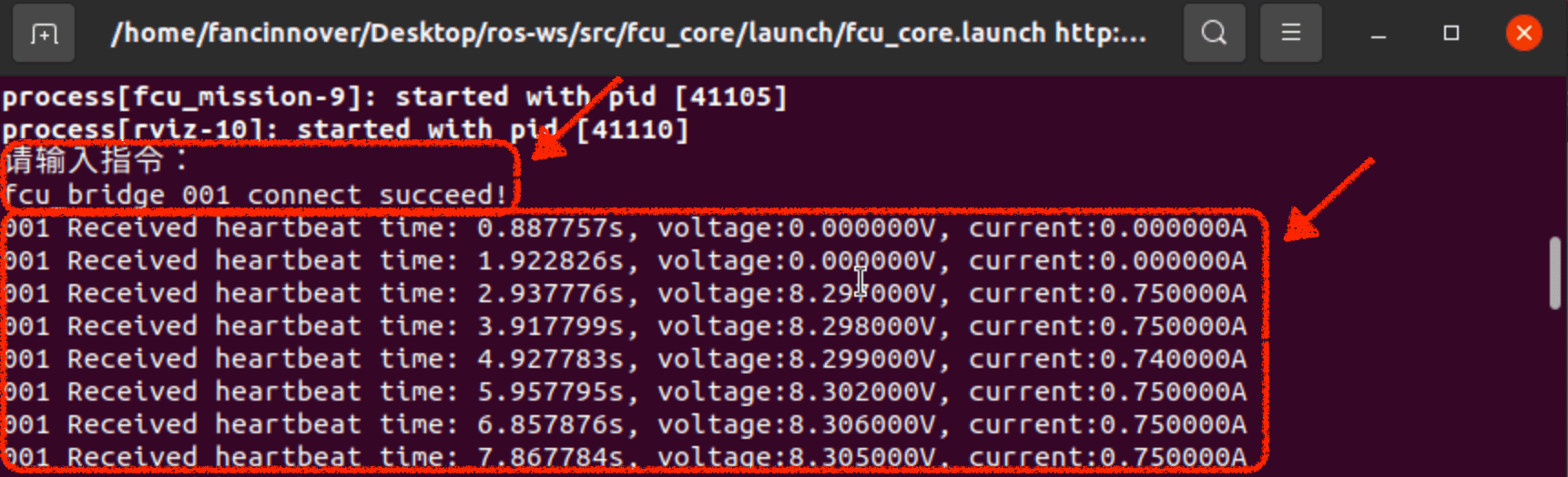
看家本领。基于FanciSwarm®全自研的高精度 UWB 定位系统,无人机实时完成位置估计后自主依据集群算法精准飞行,整个飞行过程借助ROS通信完成。
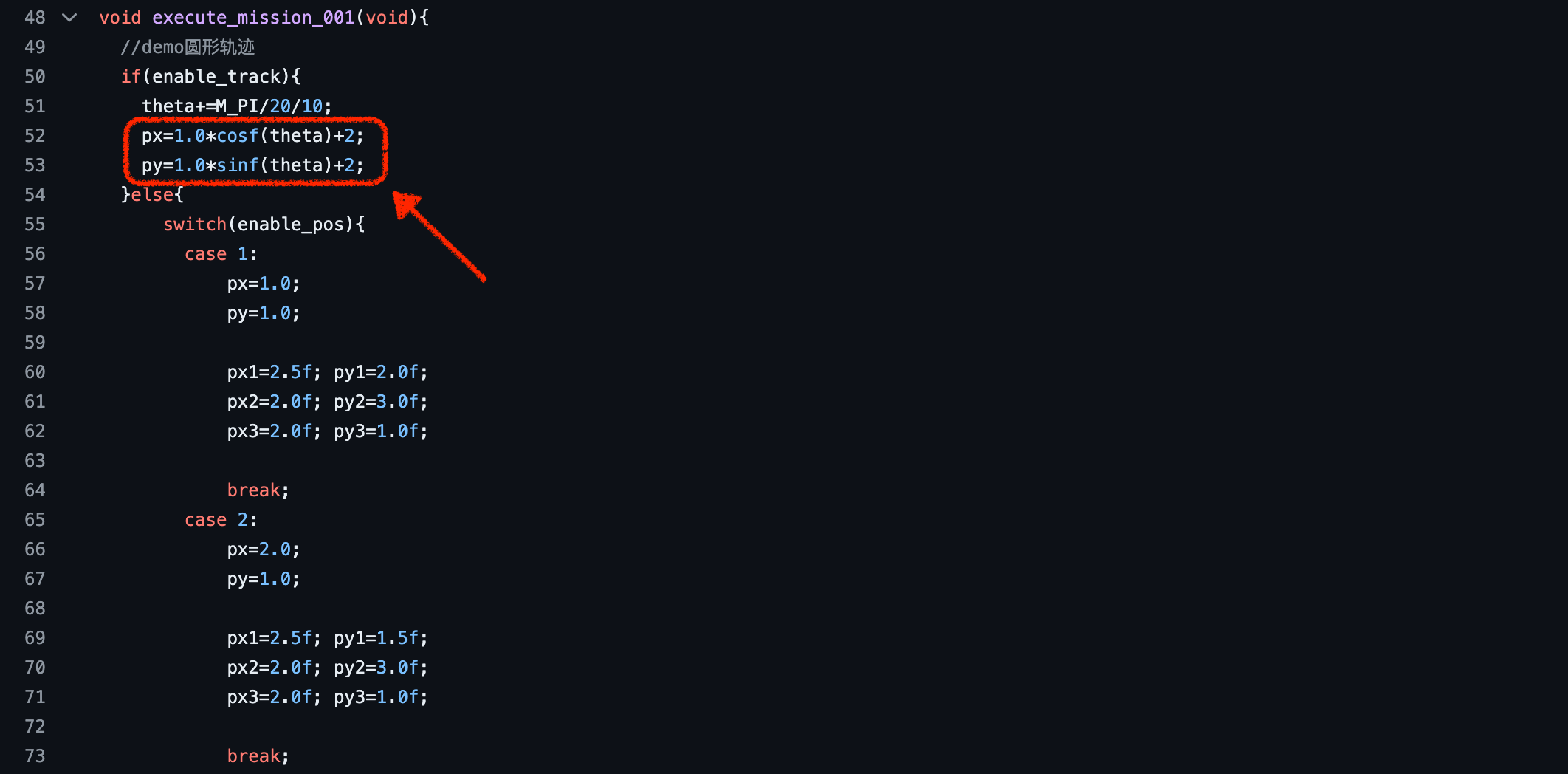
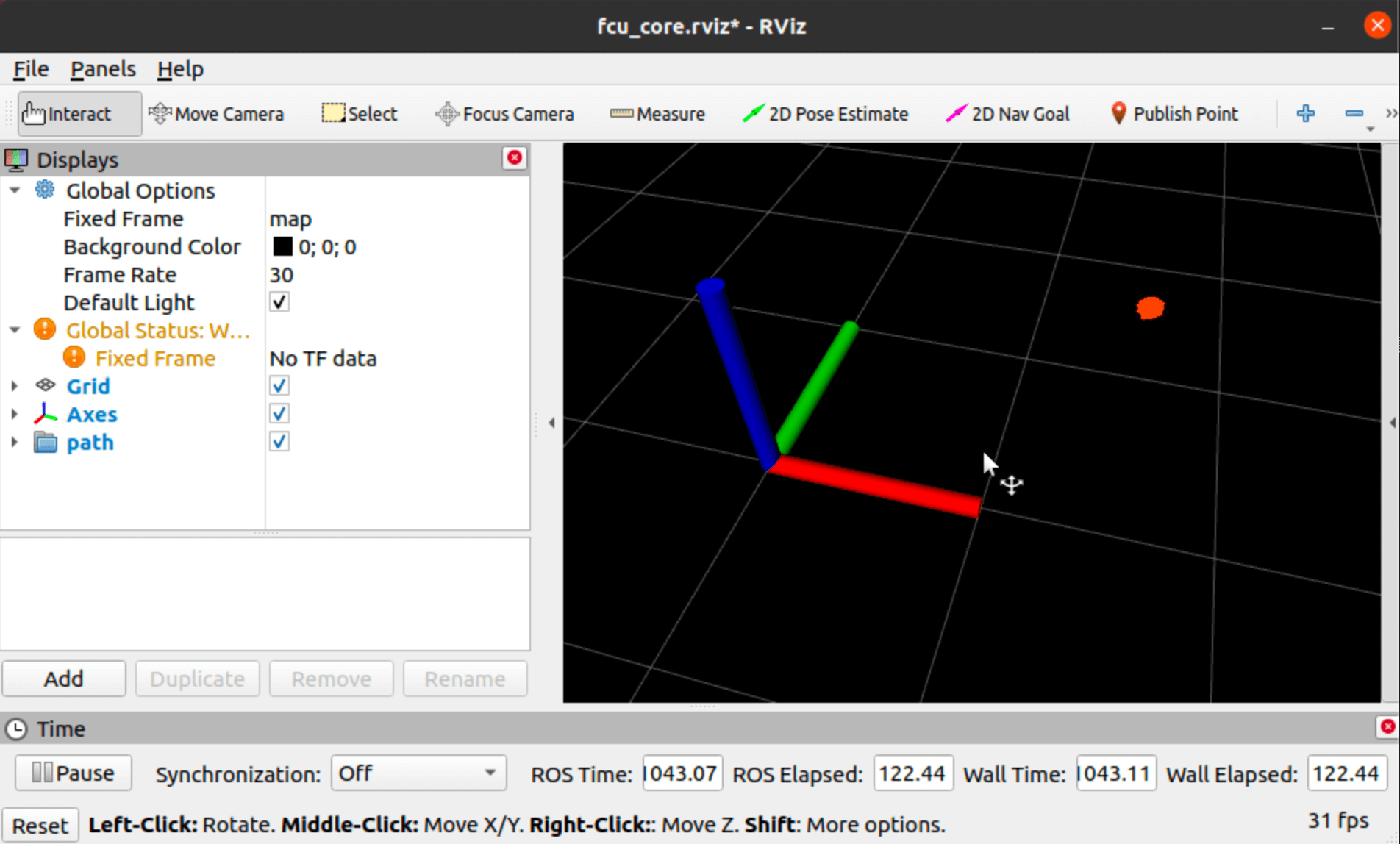
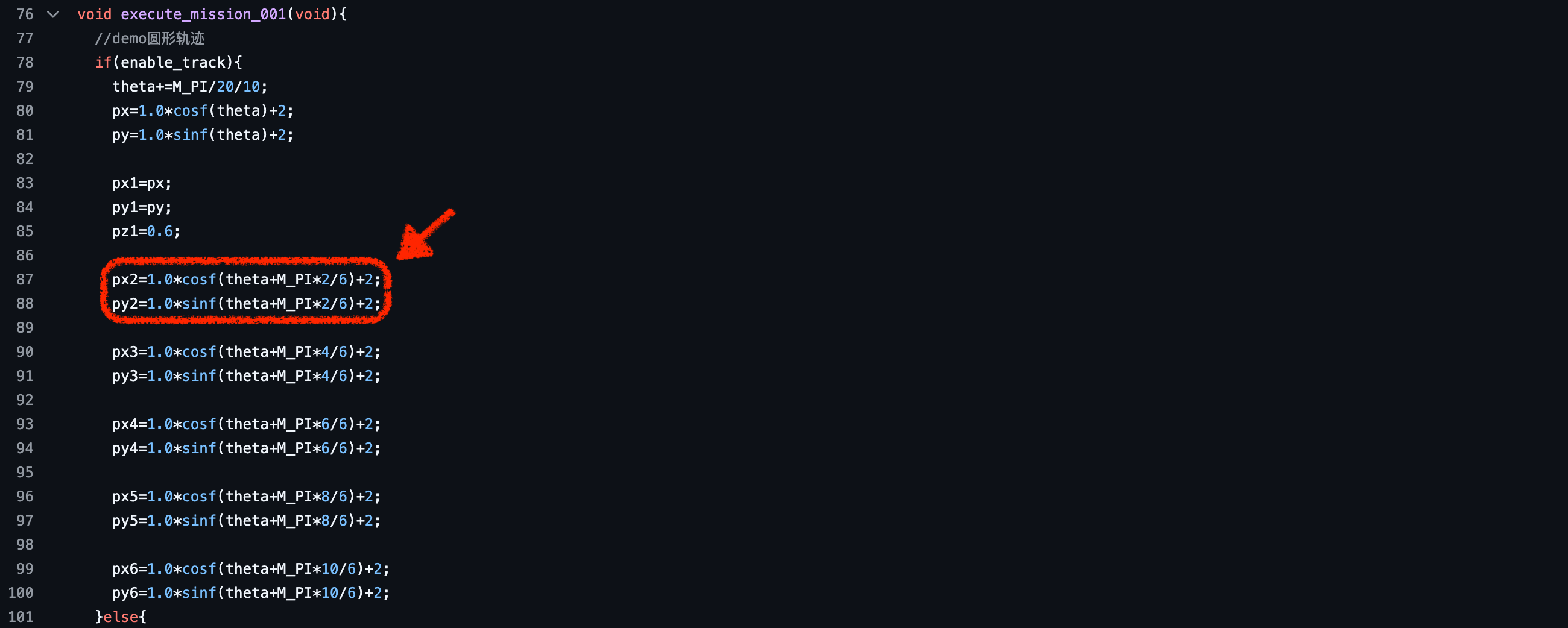
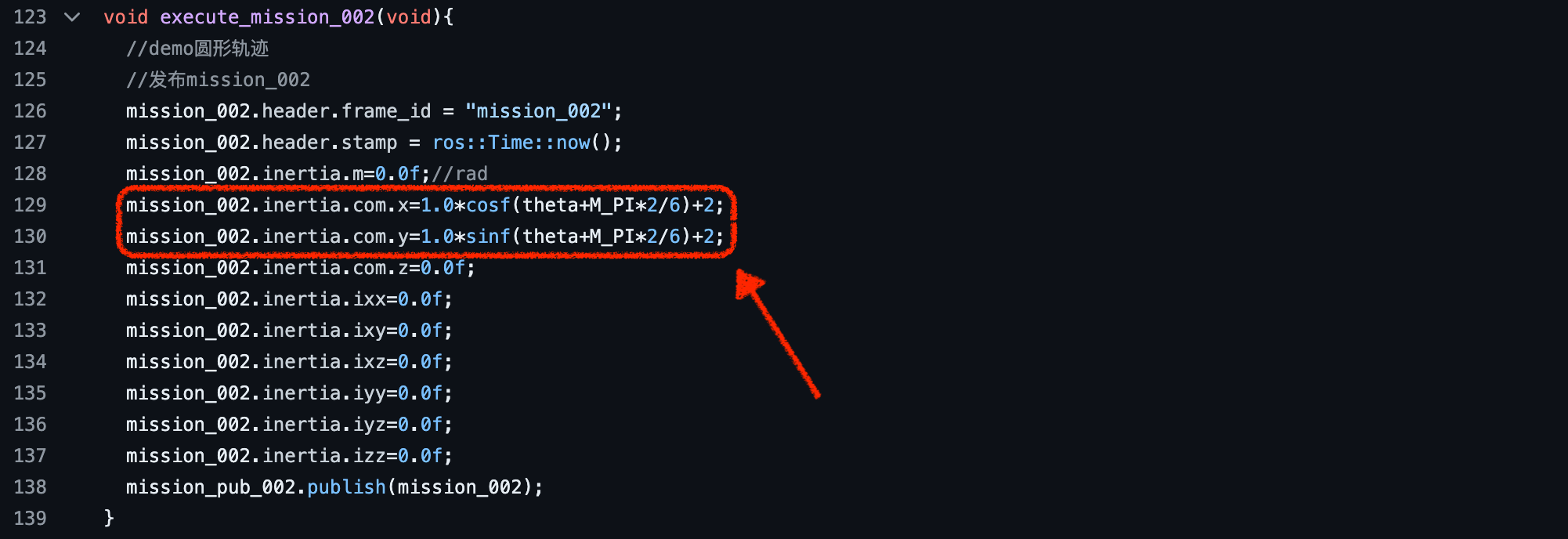
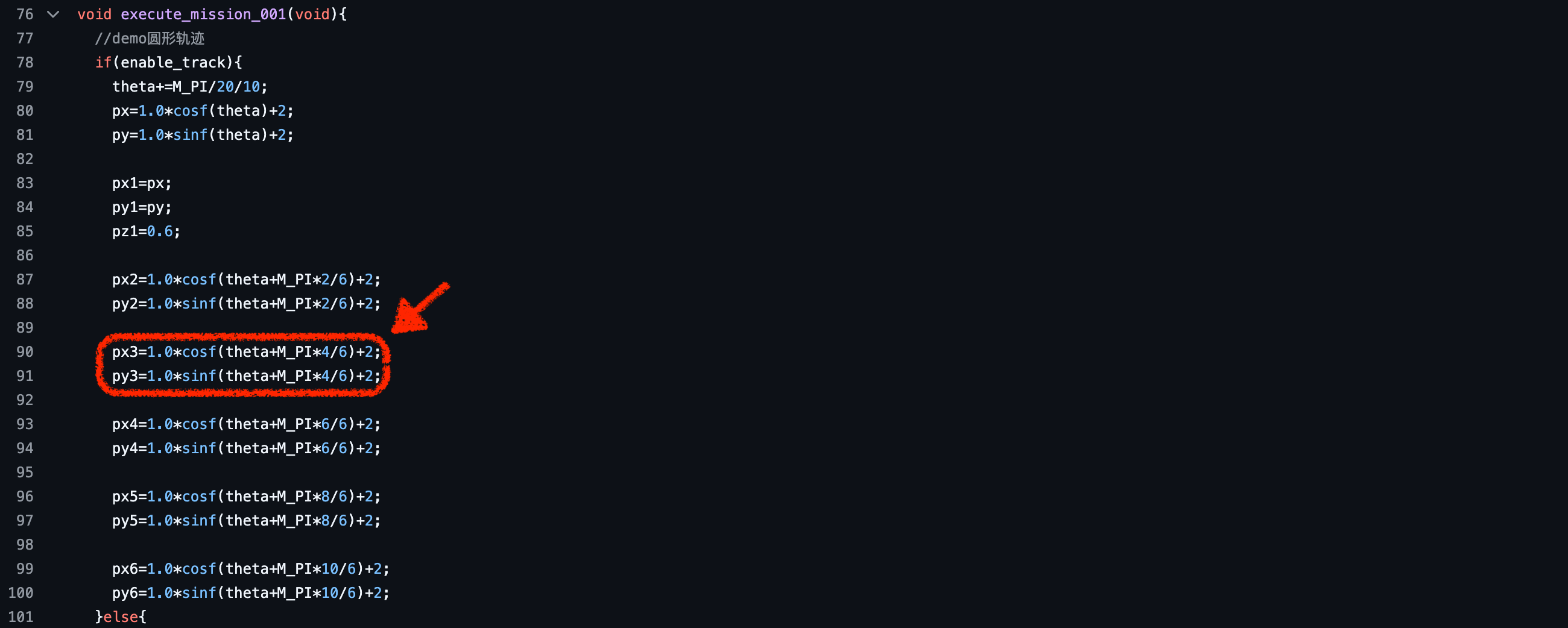
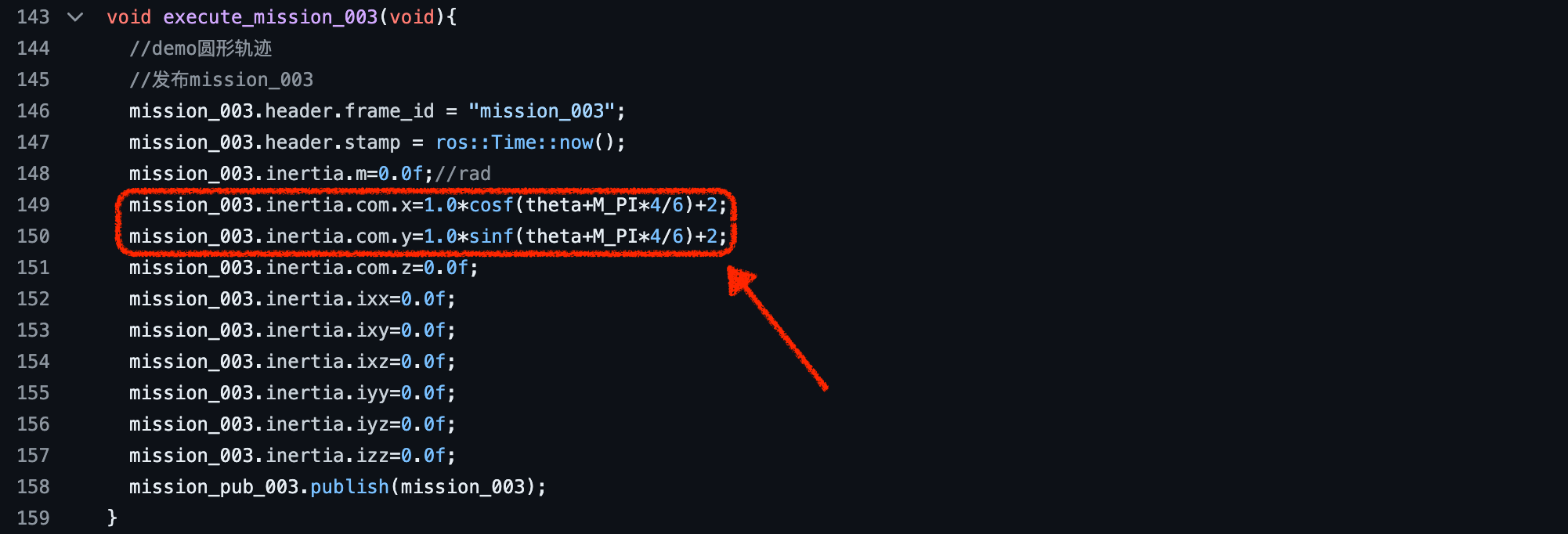
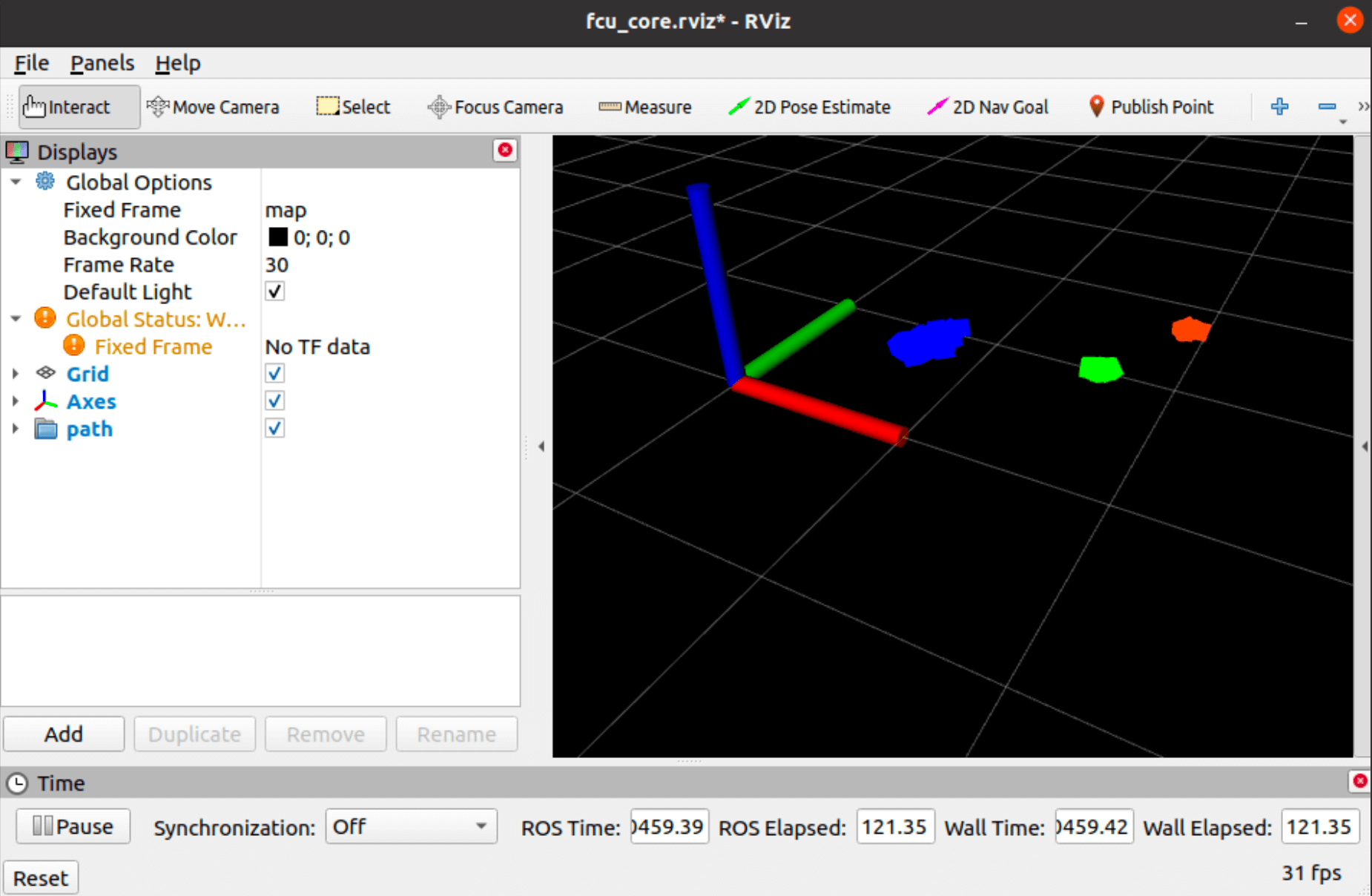
轨迹飞行
拿手好戏。基于FanciSwarm®全自研的高精度 UWB 定位系统,无人机实时完成位置估计后自主依据轨迹指令精准飞行,整个飞行过程借助ROS通信完成。
好玩更好用
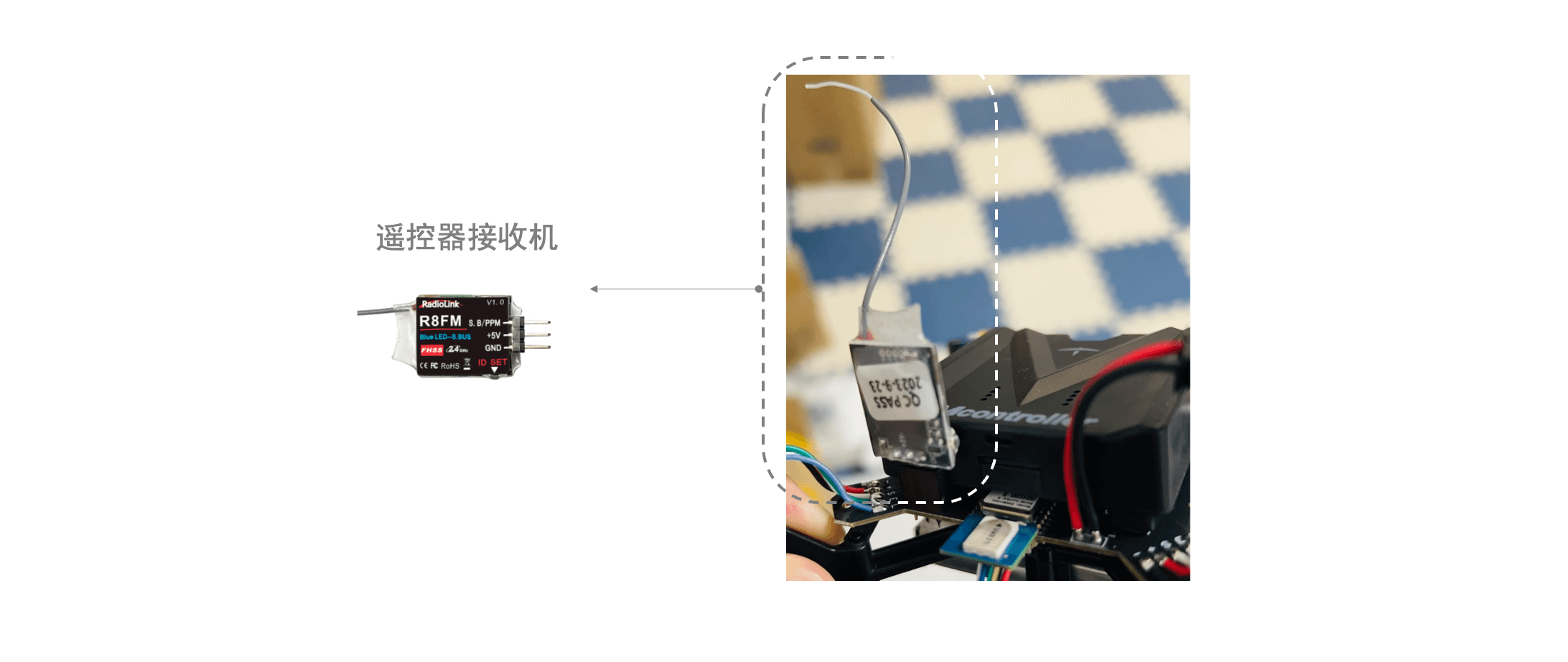
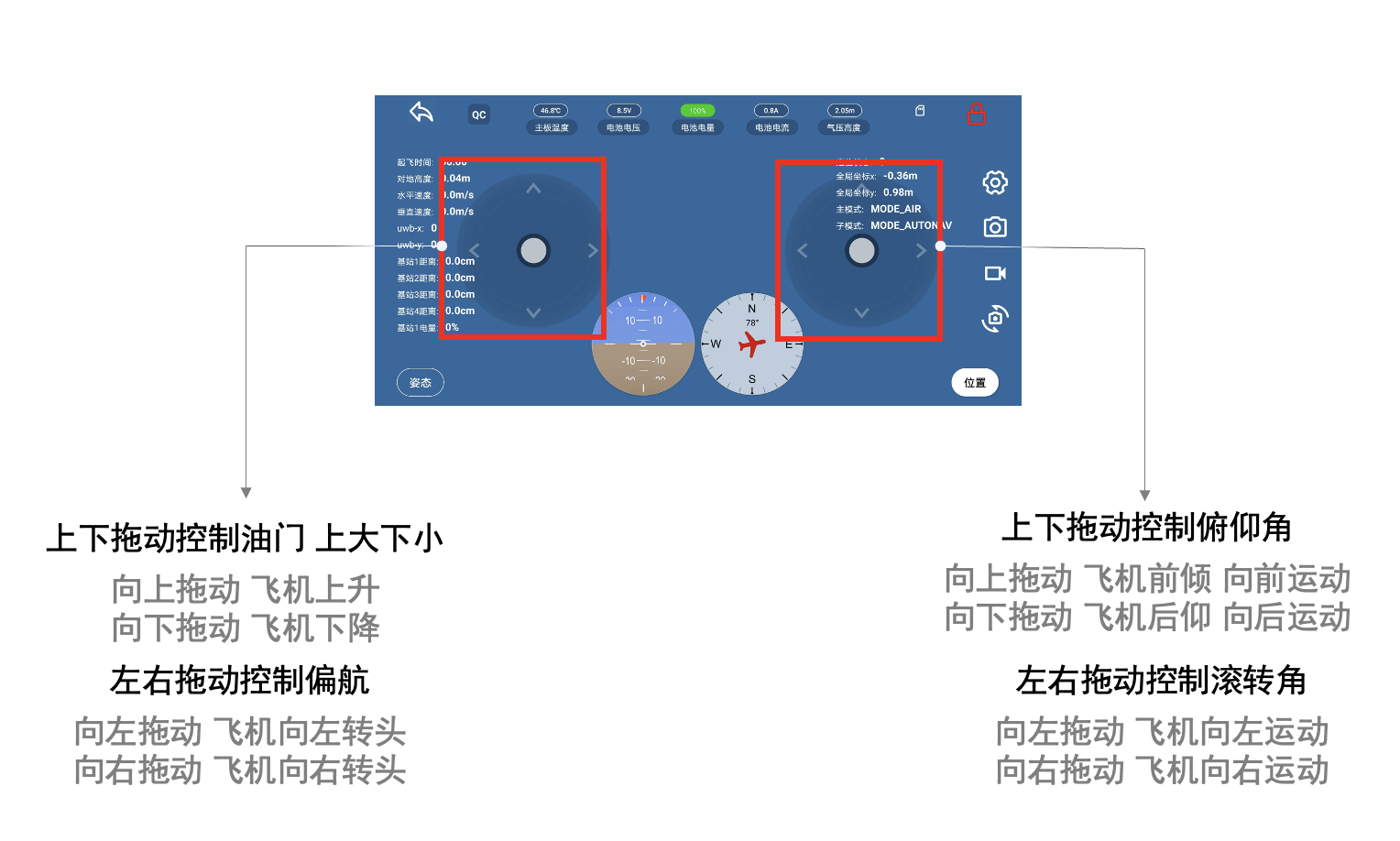
FanciSwarm®支持顺畅的无线连接,多平台轻松控制 一 手机(Android/iOS)、Pad(Android/iOS)、电脑(ROS)以及遥控器。
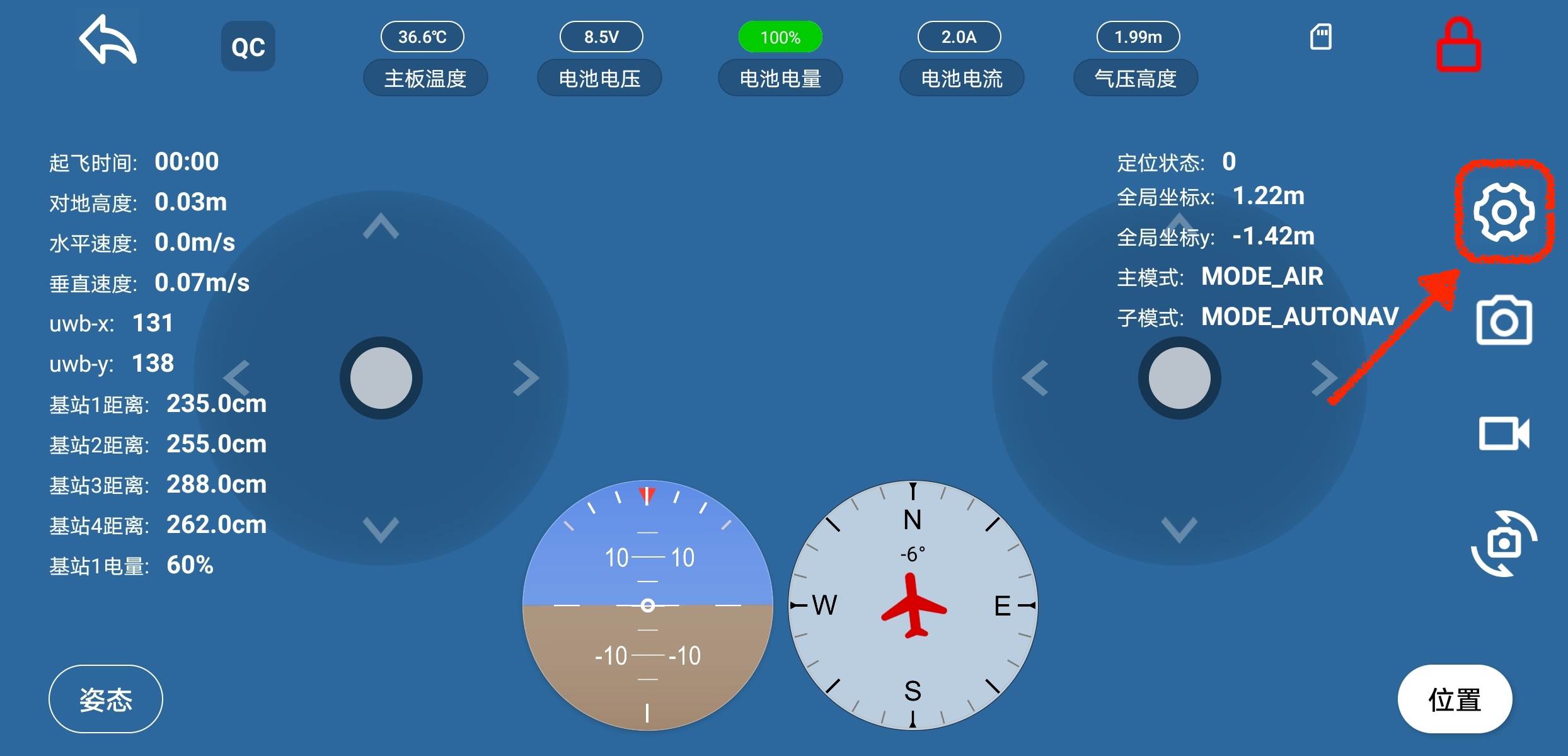
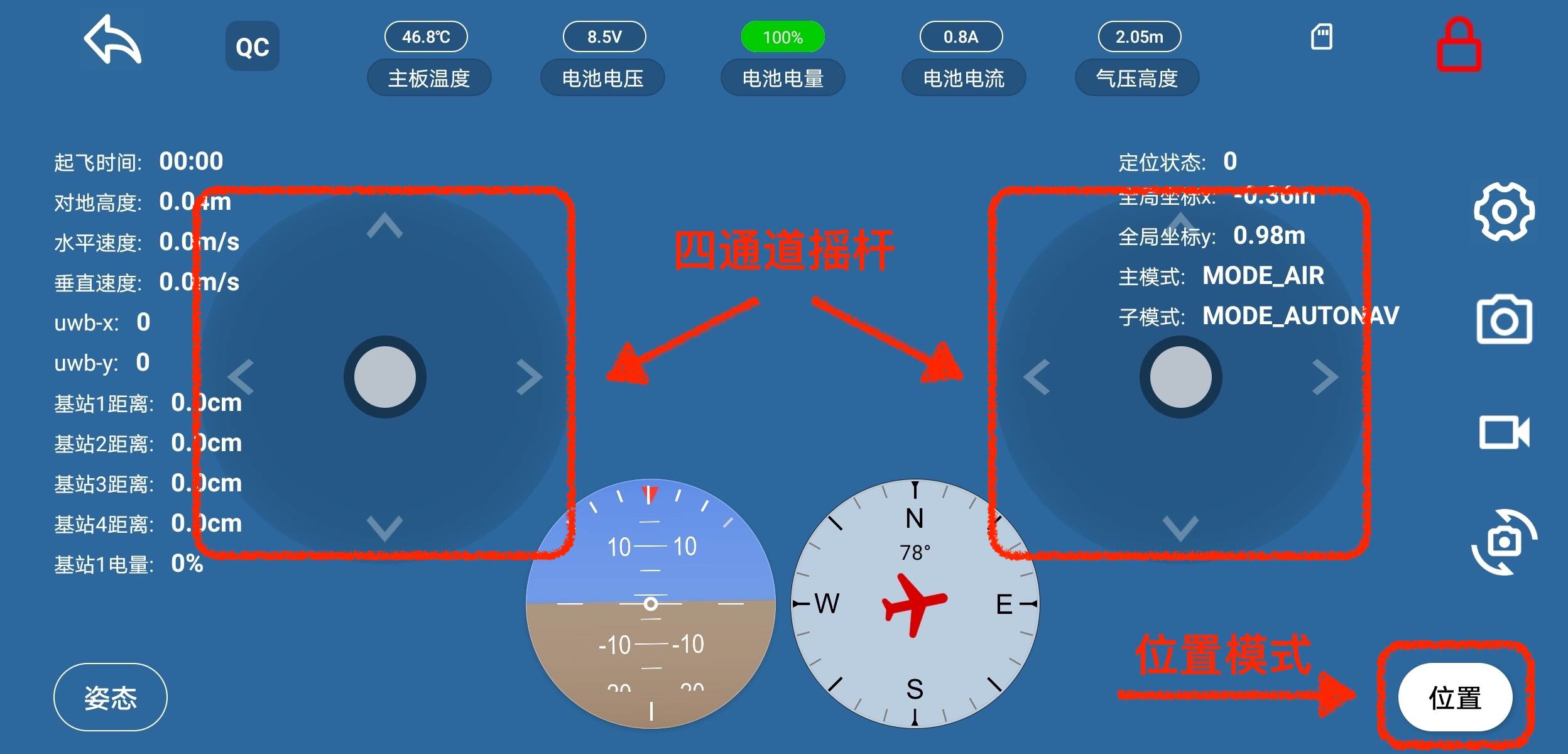
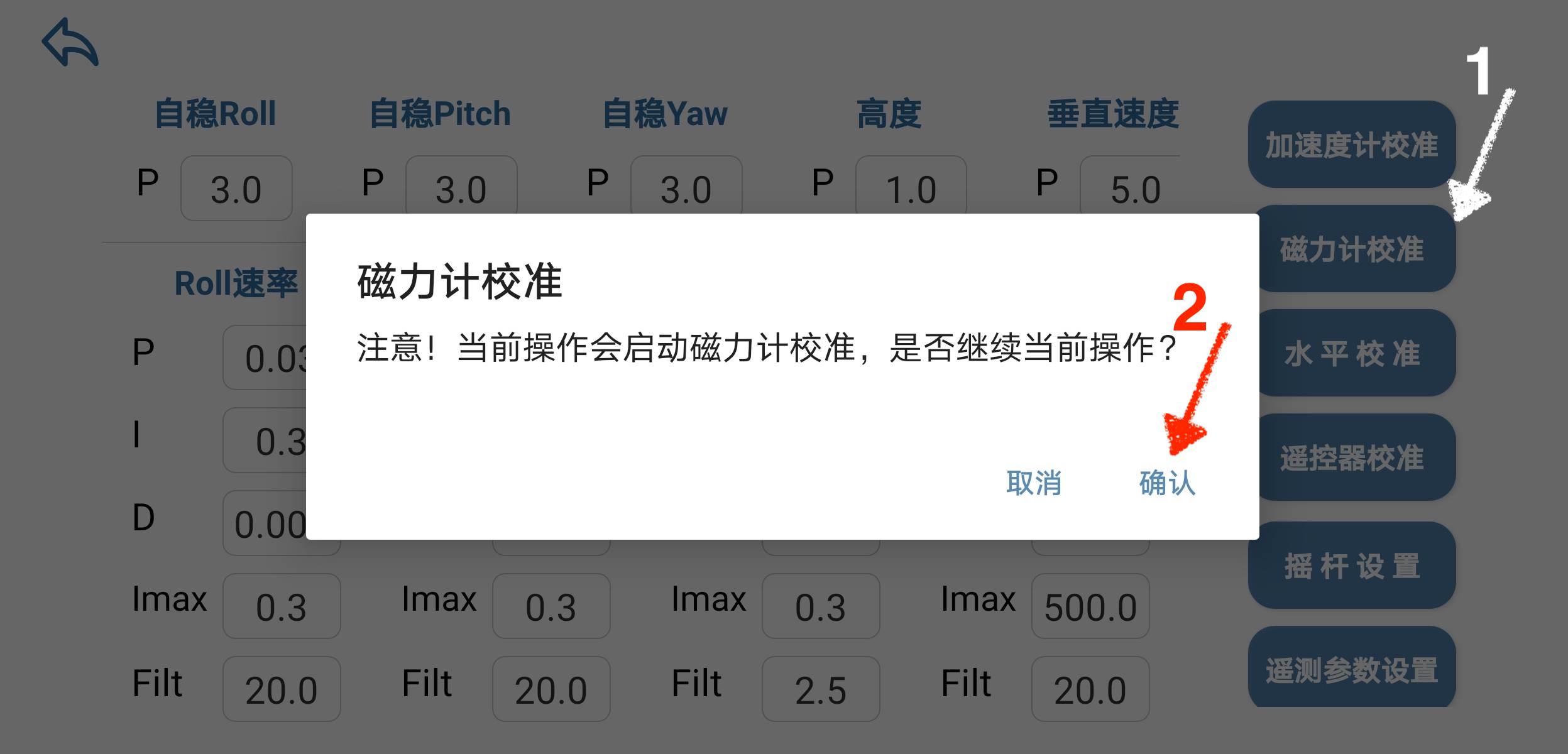
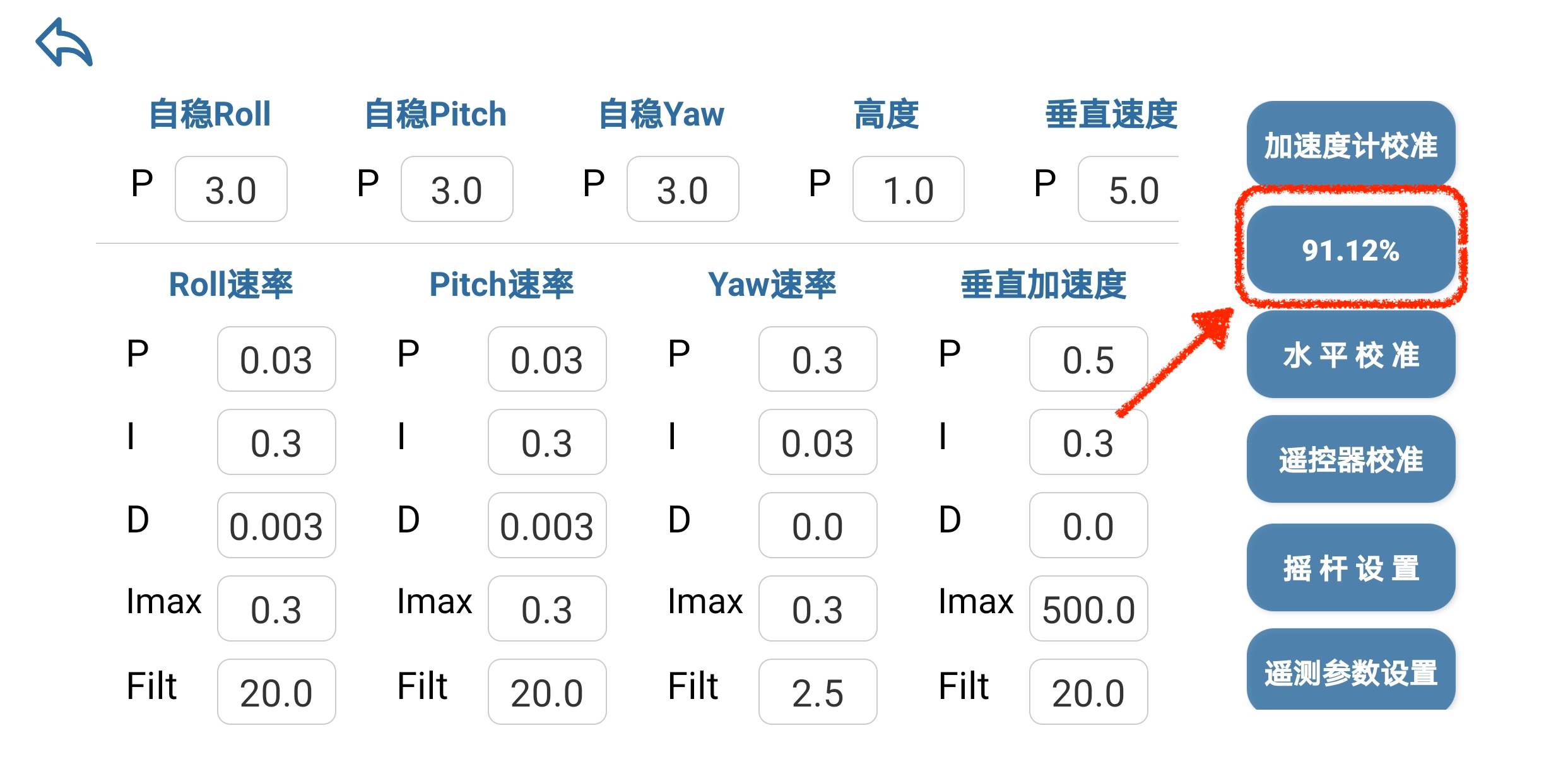
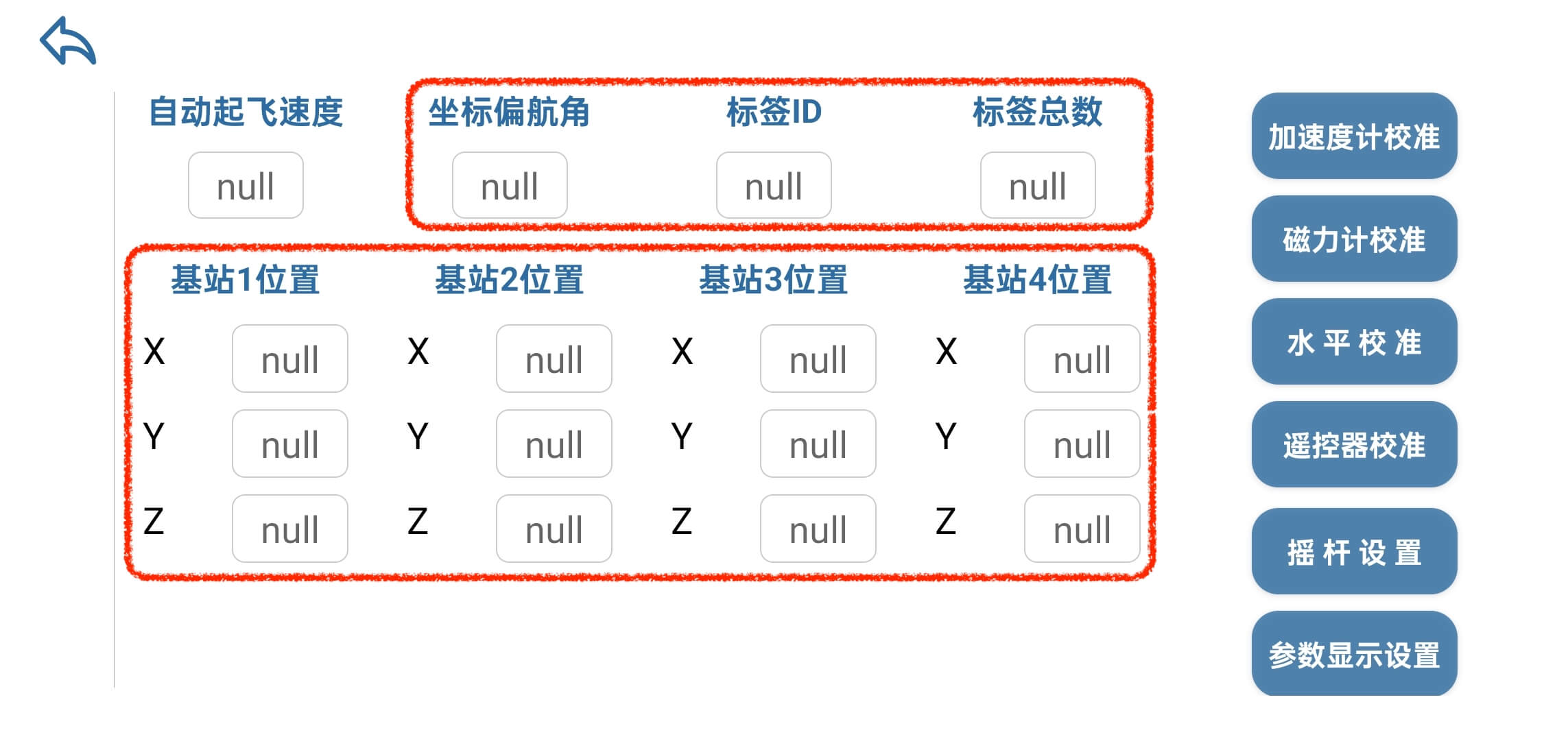
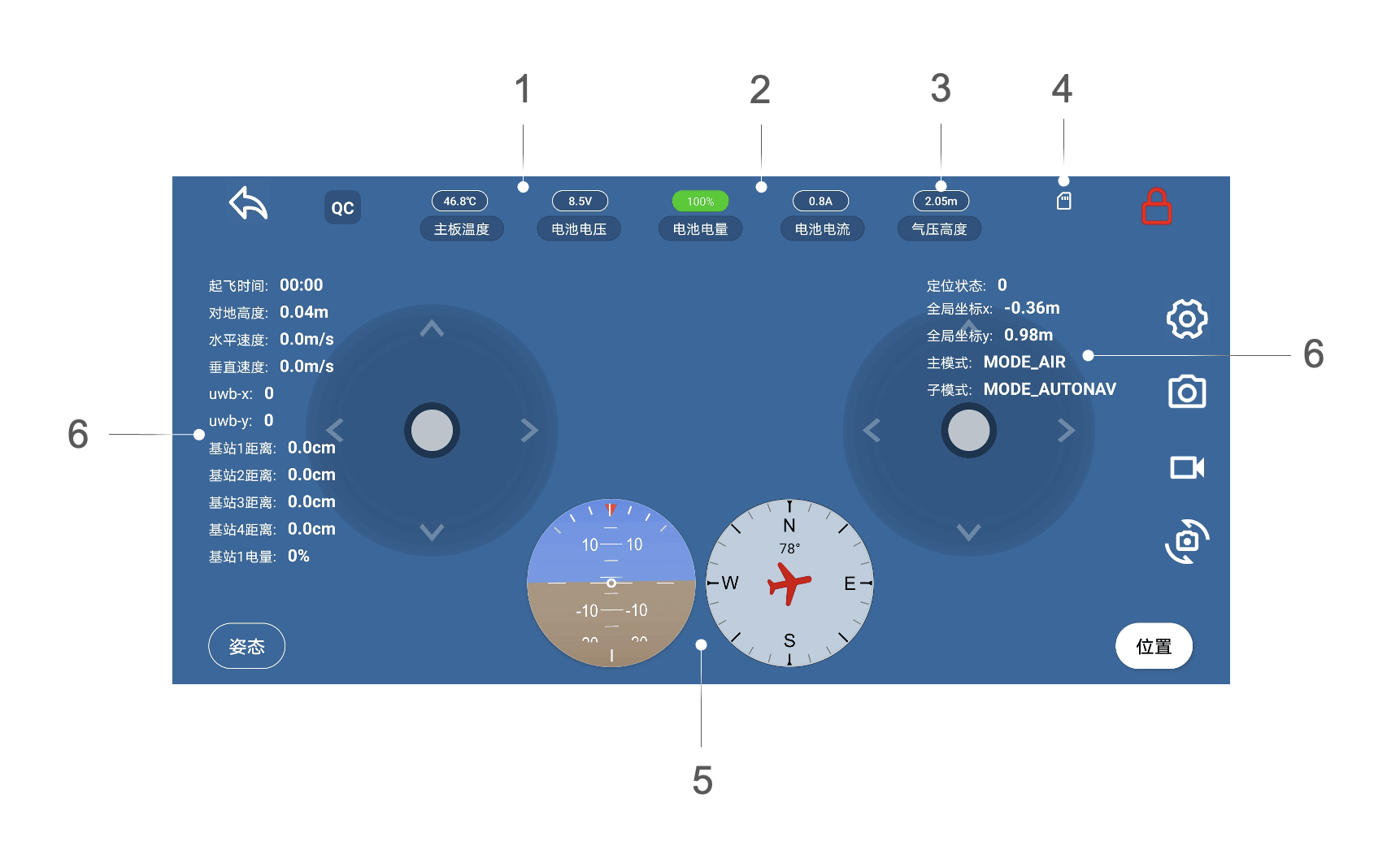
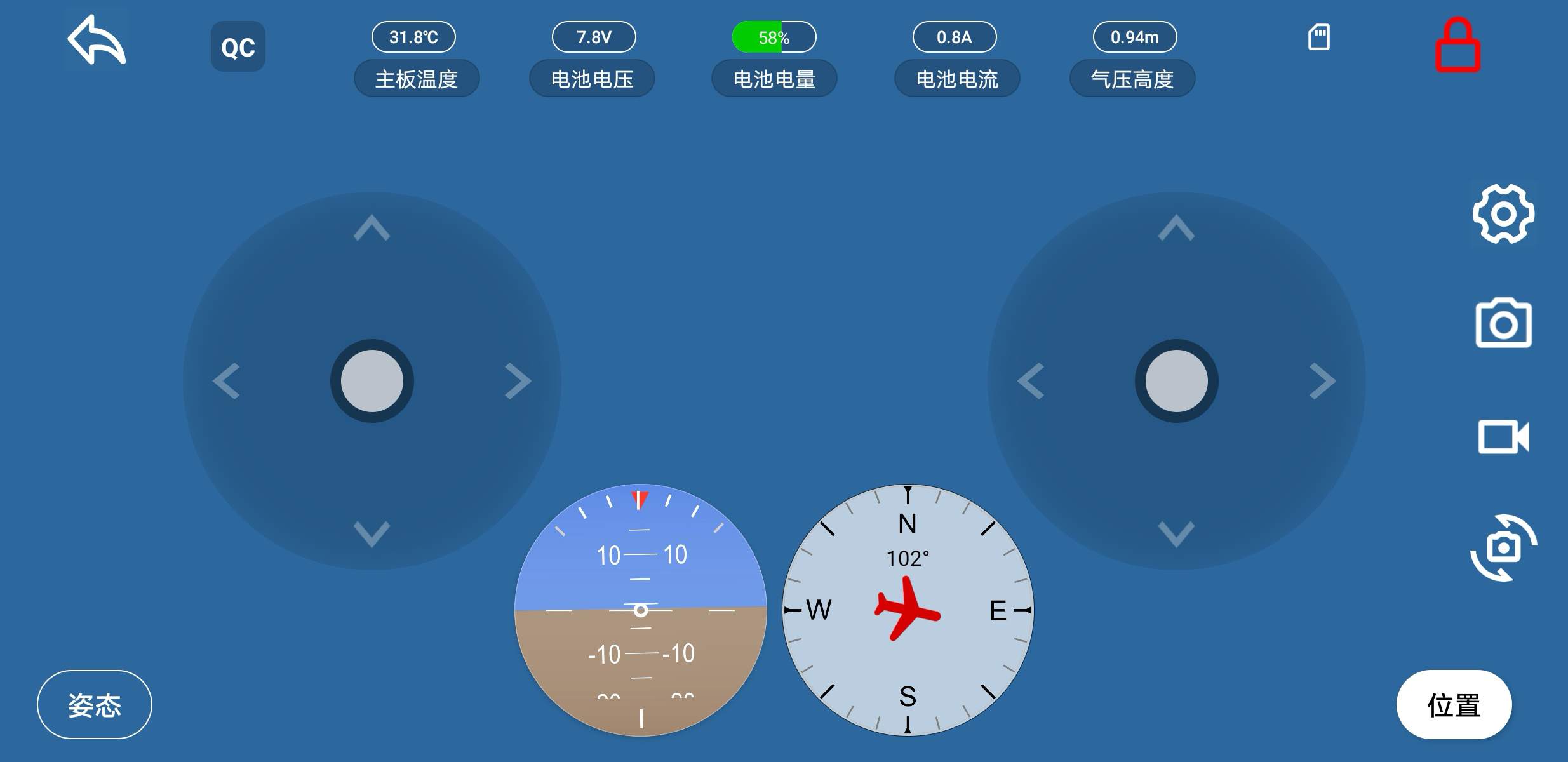
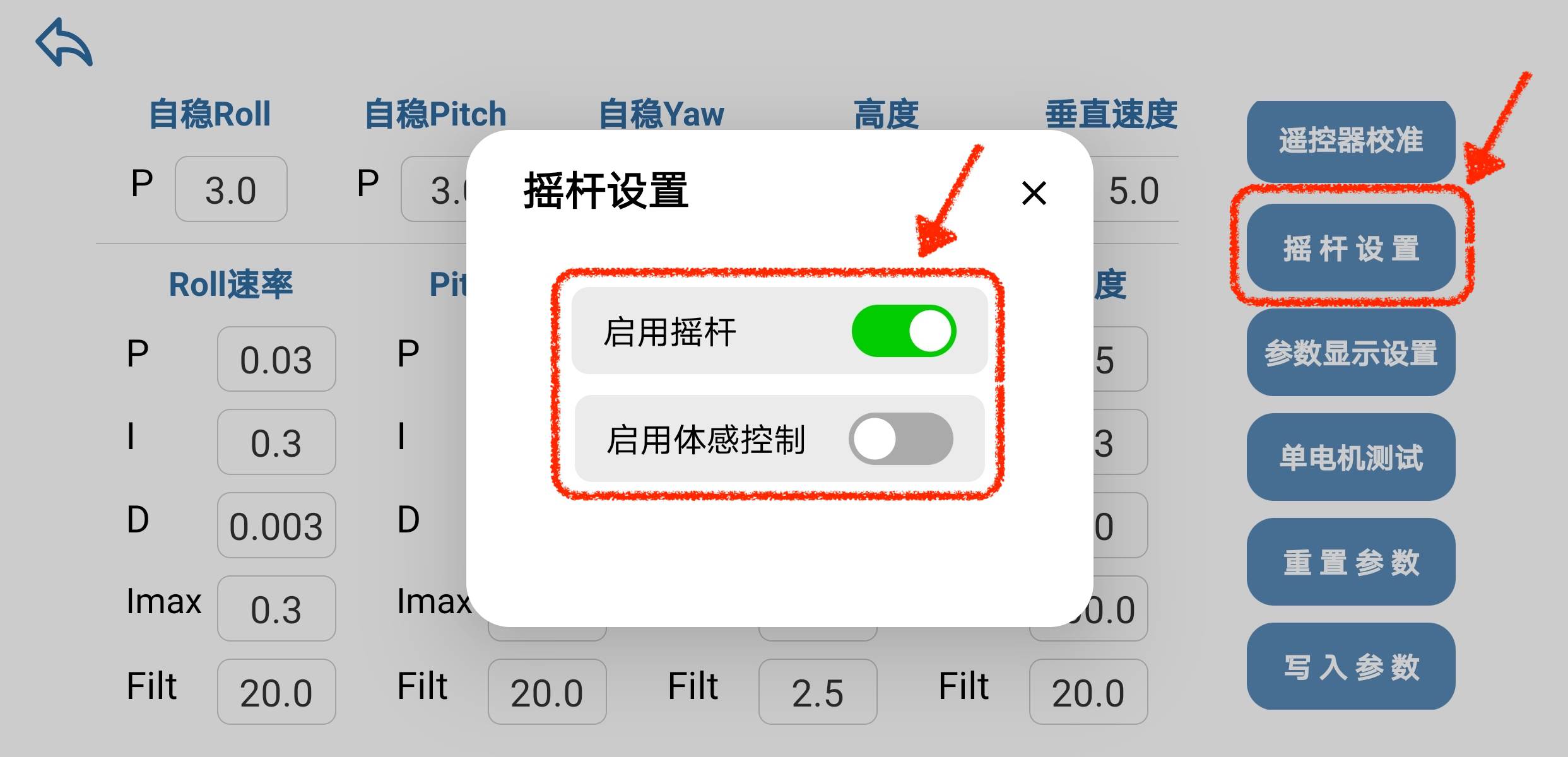
配套易用高效的App
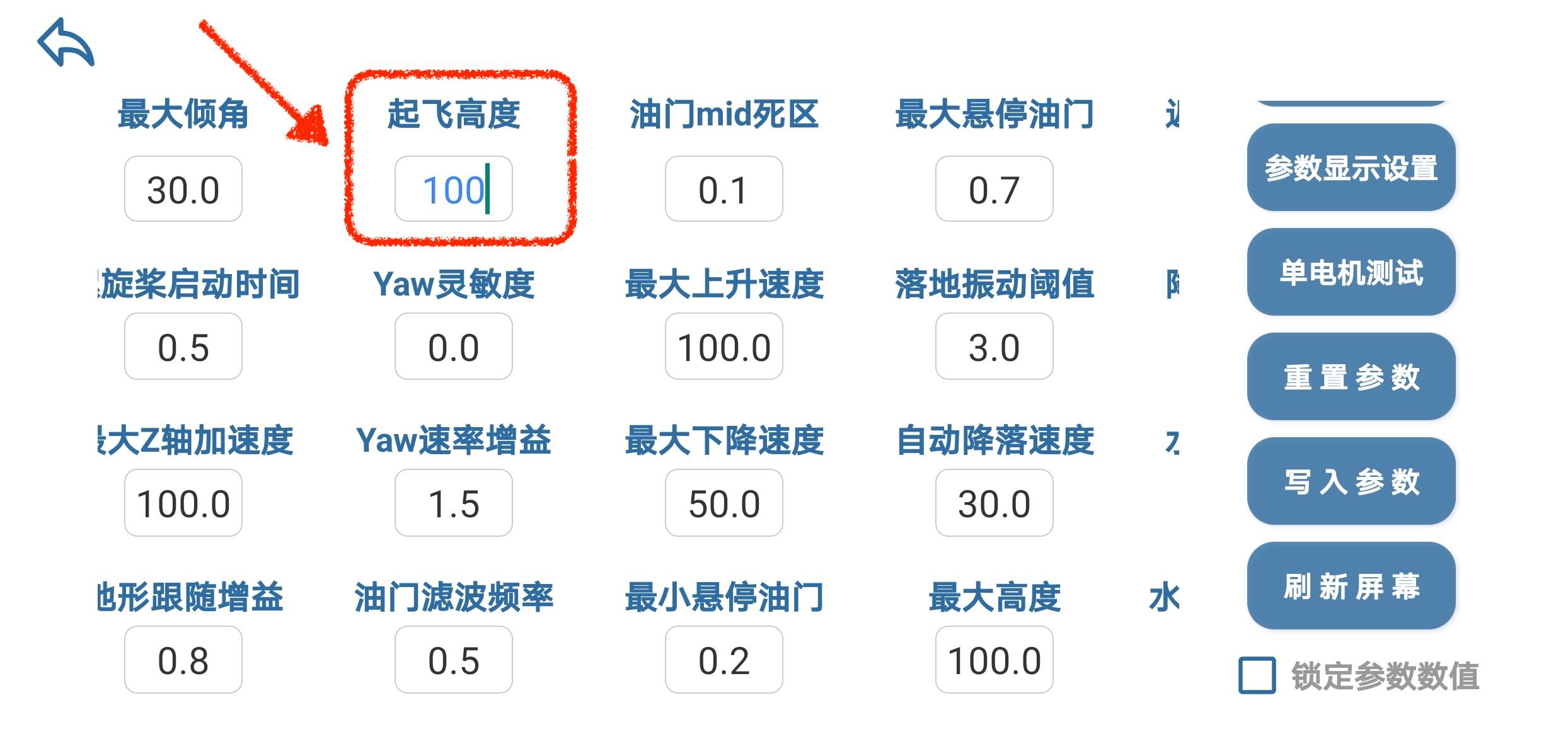
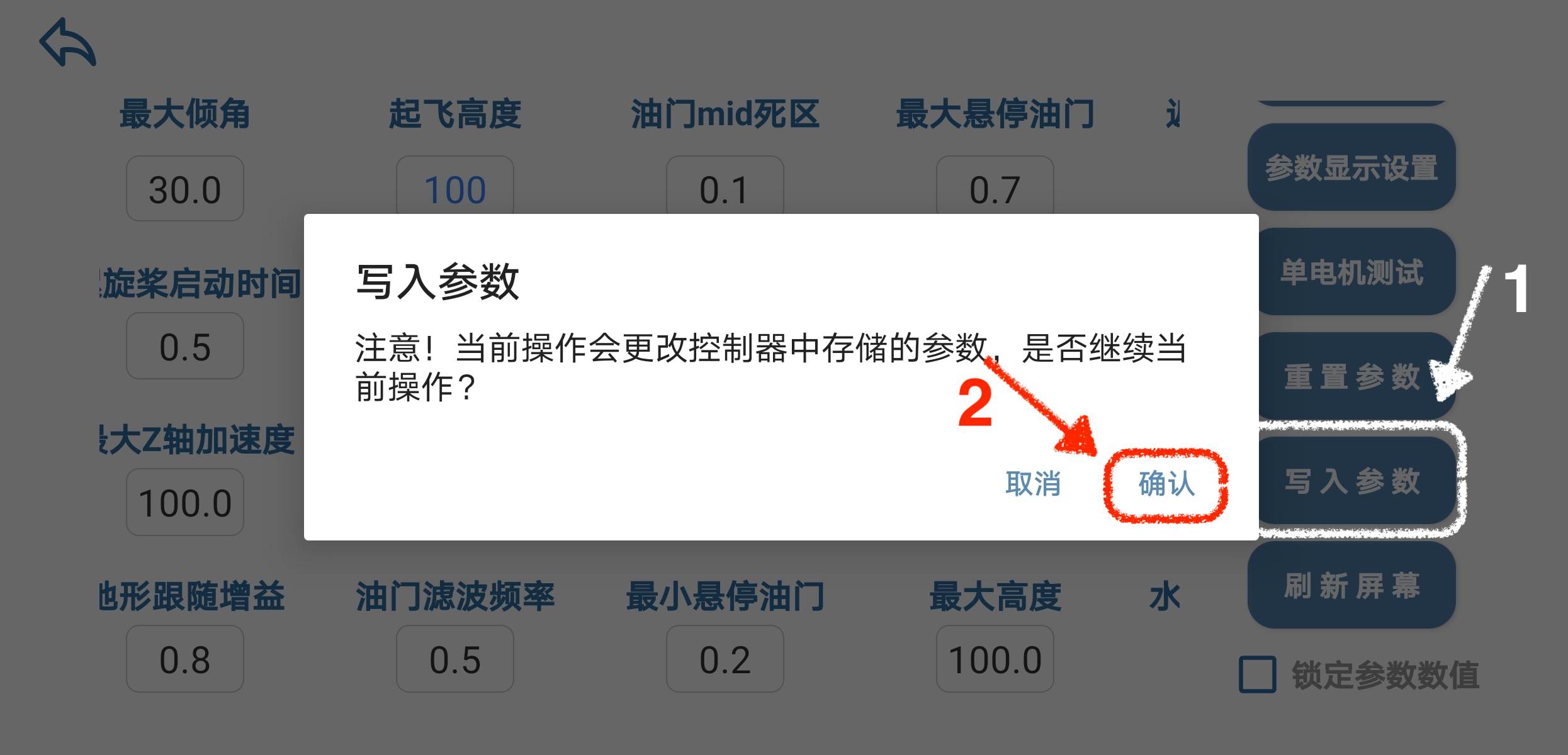
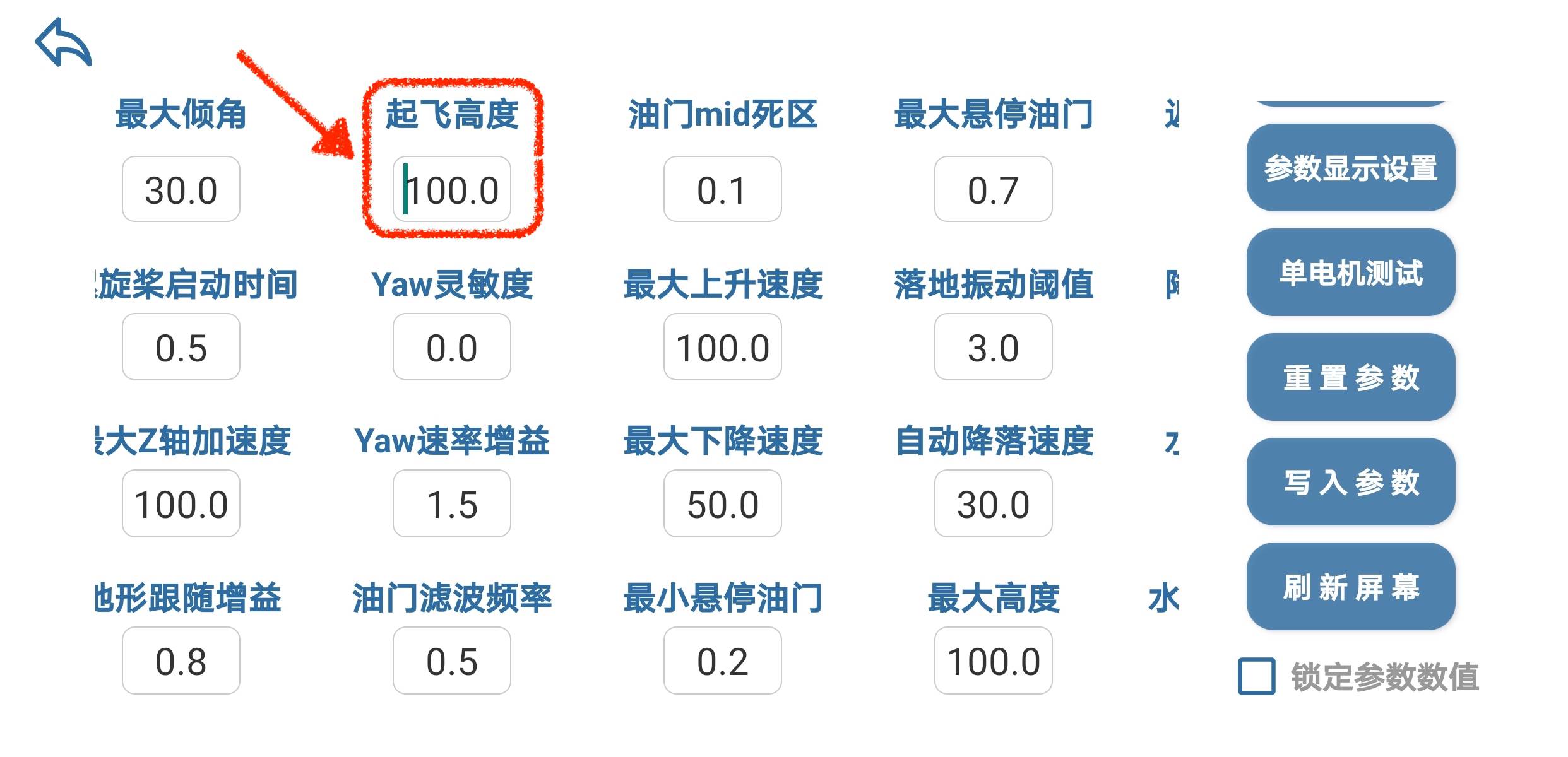
FanciSwarm App UI界面简洁舒适,功能按钮简单易用,快速便捷调参、状态精准监测、体感遥控、实时图传、拍照录像......并配套详细的使用指南。
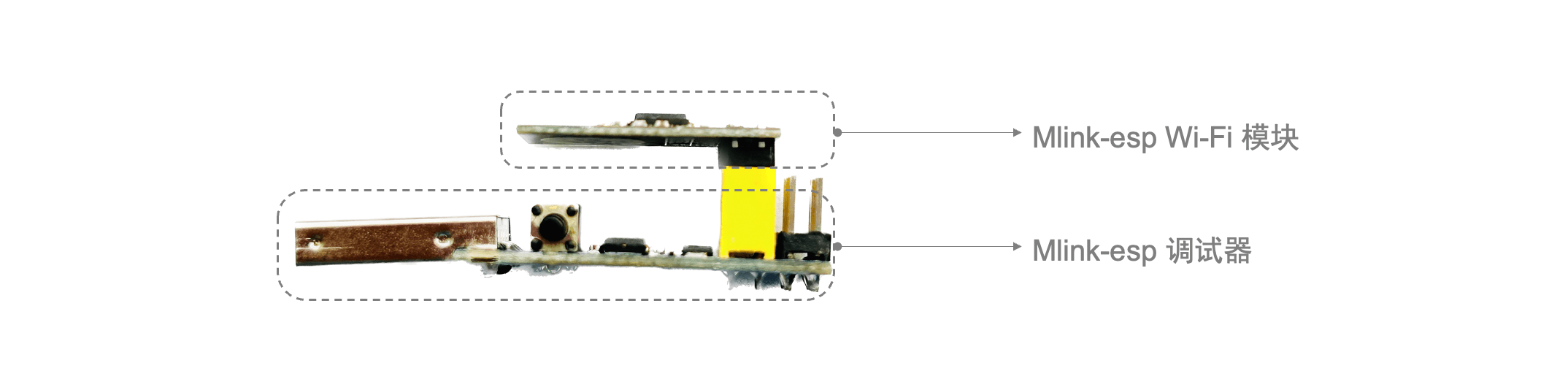
妙趣横生
无缝搭配Mlink-video图传数传一体模组,实时图传,航拍录像,二次开发。
强大的实验平台
FanciSwarm®让你做你所专注的。全心专注于集群算法开发,无需惦记飞行控制问题;全心专注于轨迹飞行实现,无需担心上手难、操作繁问题;全心专注于飞控算法开发,无需担心软硬件配置问题……实验和快速验证放心交给FanciSwarm®。
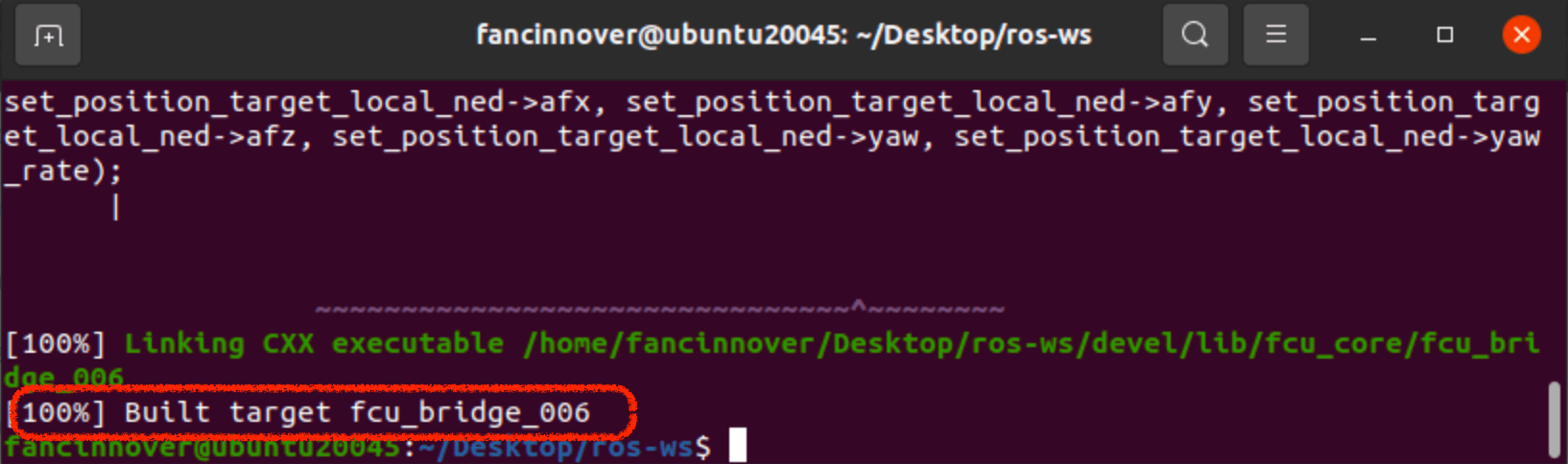
强大的开源飞行开发平台
(1)FanciSwarm®软件开源,编程扩展性更强。全自研跨模态系统架构,层级分明,清晰易懂,更快上手,更易二次开发;
(2)FanciSwarm®飞控扩展板留有多个接口,硬件扩展性更强。你可以很容易地在FanciSwarm®上增加GPS模块、舵机模块或者其他模块以满足你的需要,这极大地拓展了开发空间,并使得开发更加灵活;
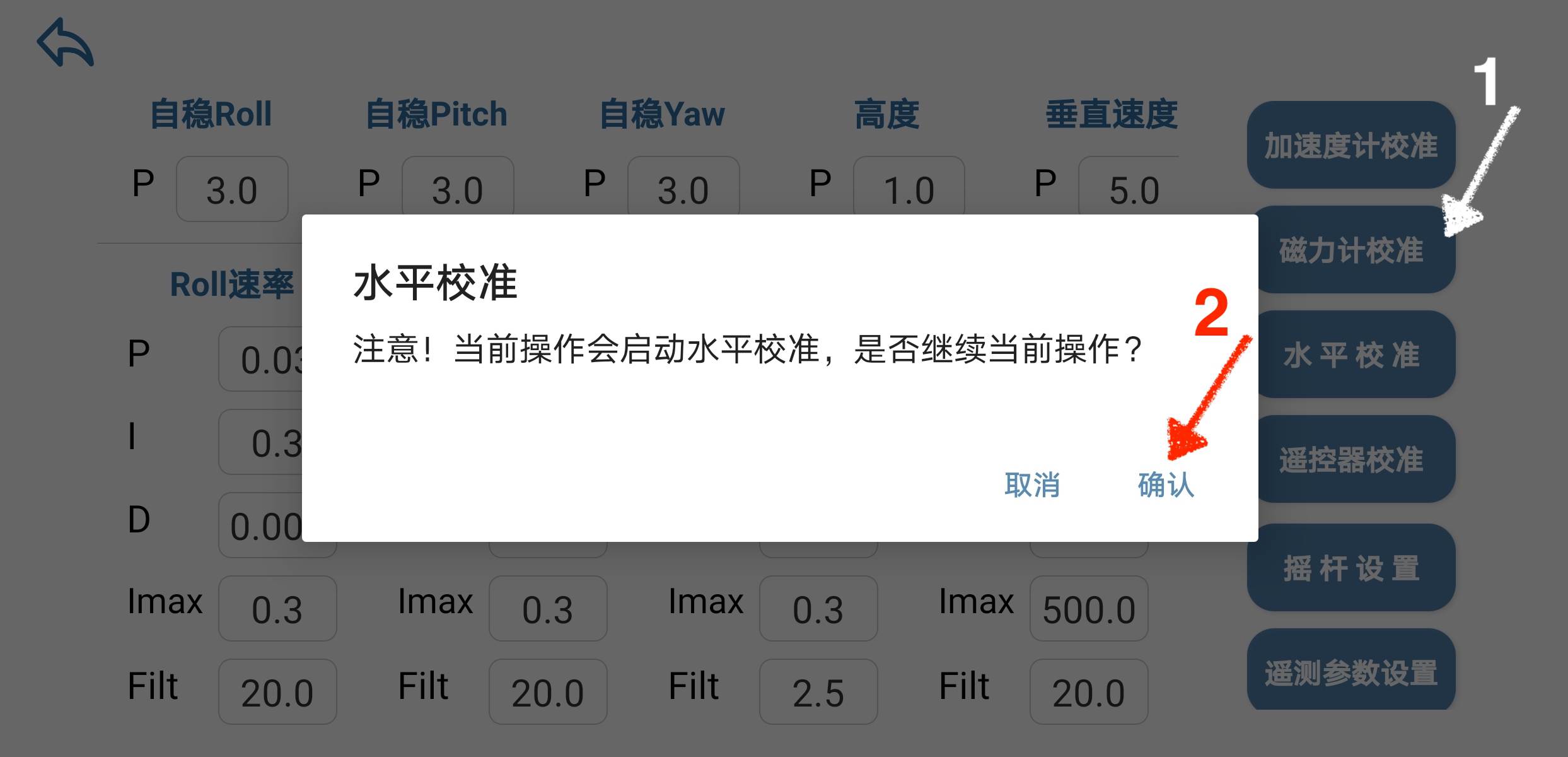
(3)配套的FanciSwarm App,可实现快速便捷配置参数,开发效率++。
事半功倍
全自研跨模态系统架构,层级分明 清晰易懂,配套教程,进阶学习,全程技术支持;App快速便捷配置参数,所见即所得,让开发更高效。
详细的教程
入门—初级应用—高级应用,全阶段覆盖,教程详尽。
具体到一行代码的技术支持
FanciSwarm® 提供终身技术支持与服务,源码详细指导,省时高效。


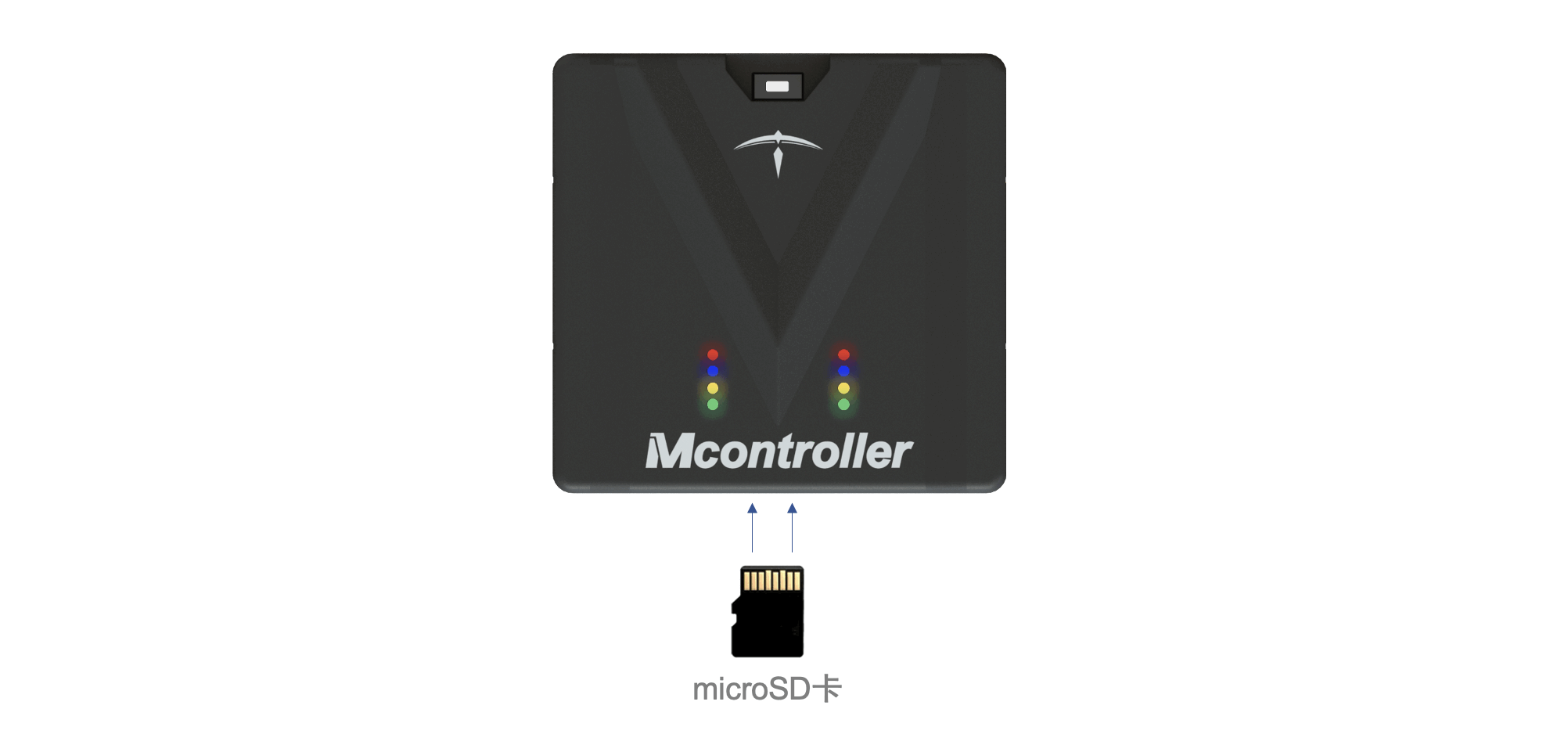
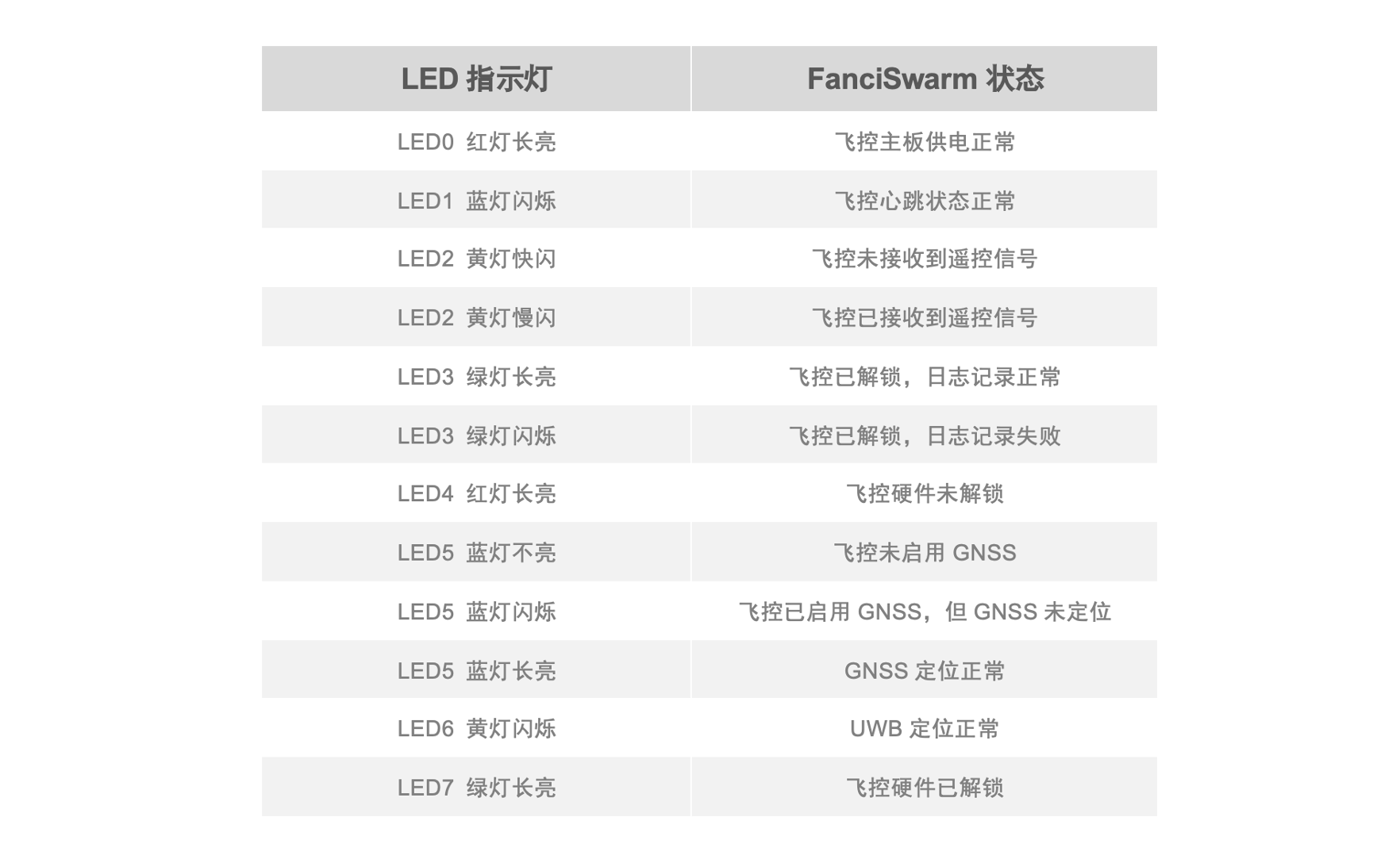
 LED0~LED7 状态说明如下图所示:
LED0~LED7 状态说明如下图所示:
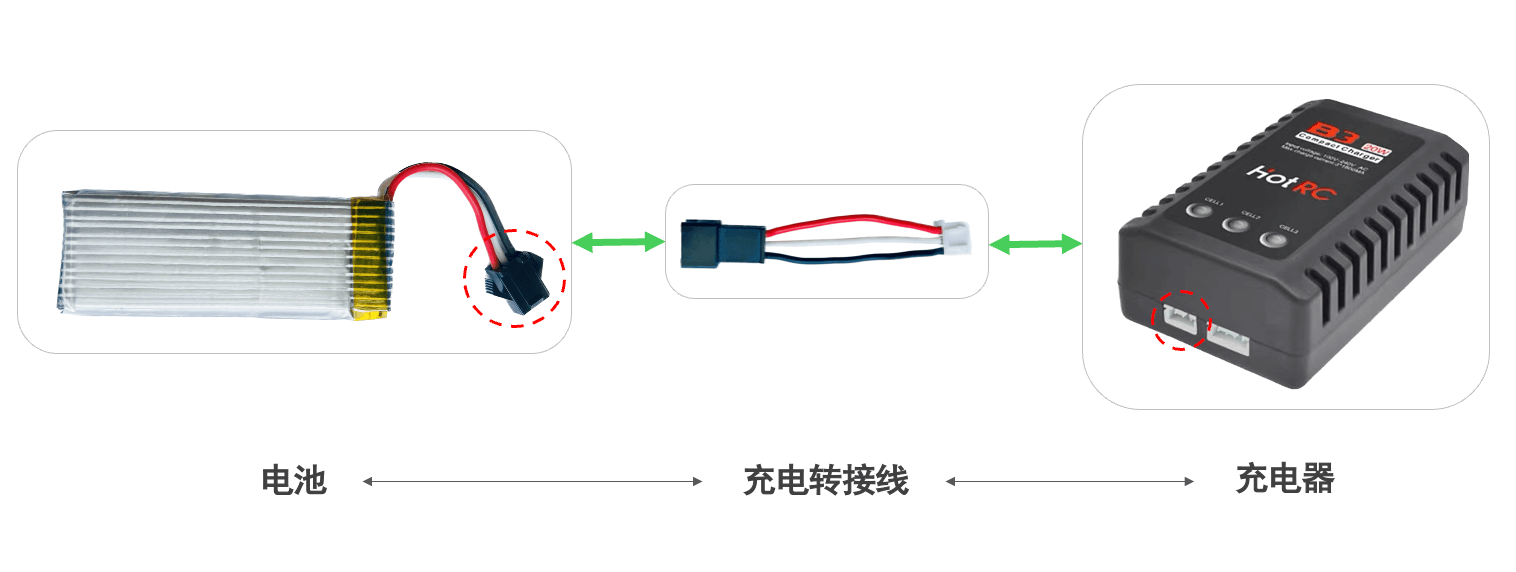 (1)在电池未充满电的状态下,充电器 LED 指示灯显示为红色;
(1)在电池未充满电的状态下,充电器 LED 指示灯显示为红色;