Mcontroller®由英文单词Multi首字母M 和英文单词controller(控制器)组成。
Mcontroller® 是一款先进的飞控系统,由北航技术团队历时五年研发,拥有多项发明专利,被广泛应用于无人机、无人车、无人船等机器人领域。其强大的性能和独创的跨模态系统架构使其成为业界新秀。 Mcontroller® 具备卓越的稳定性、可扩展性和灵活性,为用户提供高效、便捷的移动机器人控制解决方案,助力教育科研和机器人产品研发。
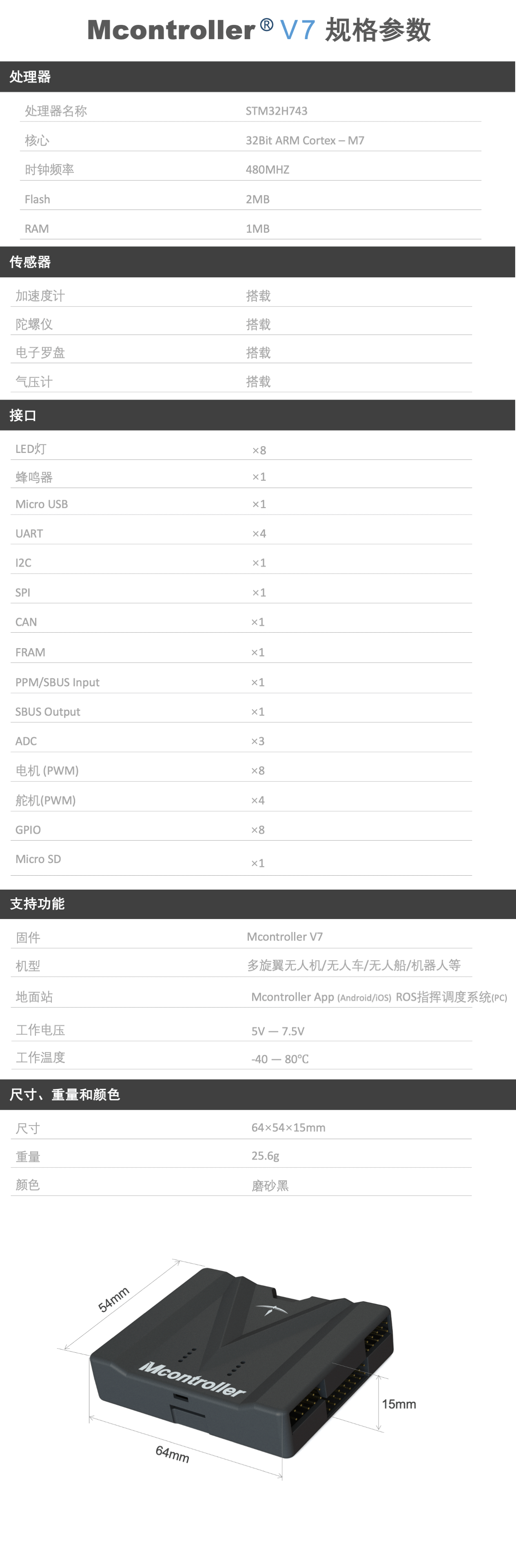
三轴加速度计
三轴磁力计
陀螺仪
气压计
CAN
I2C
microSD
…
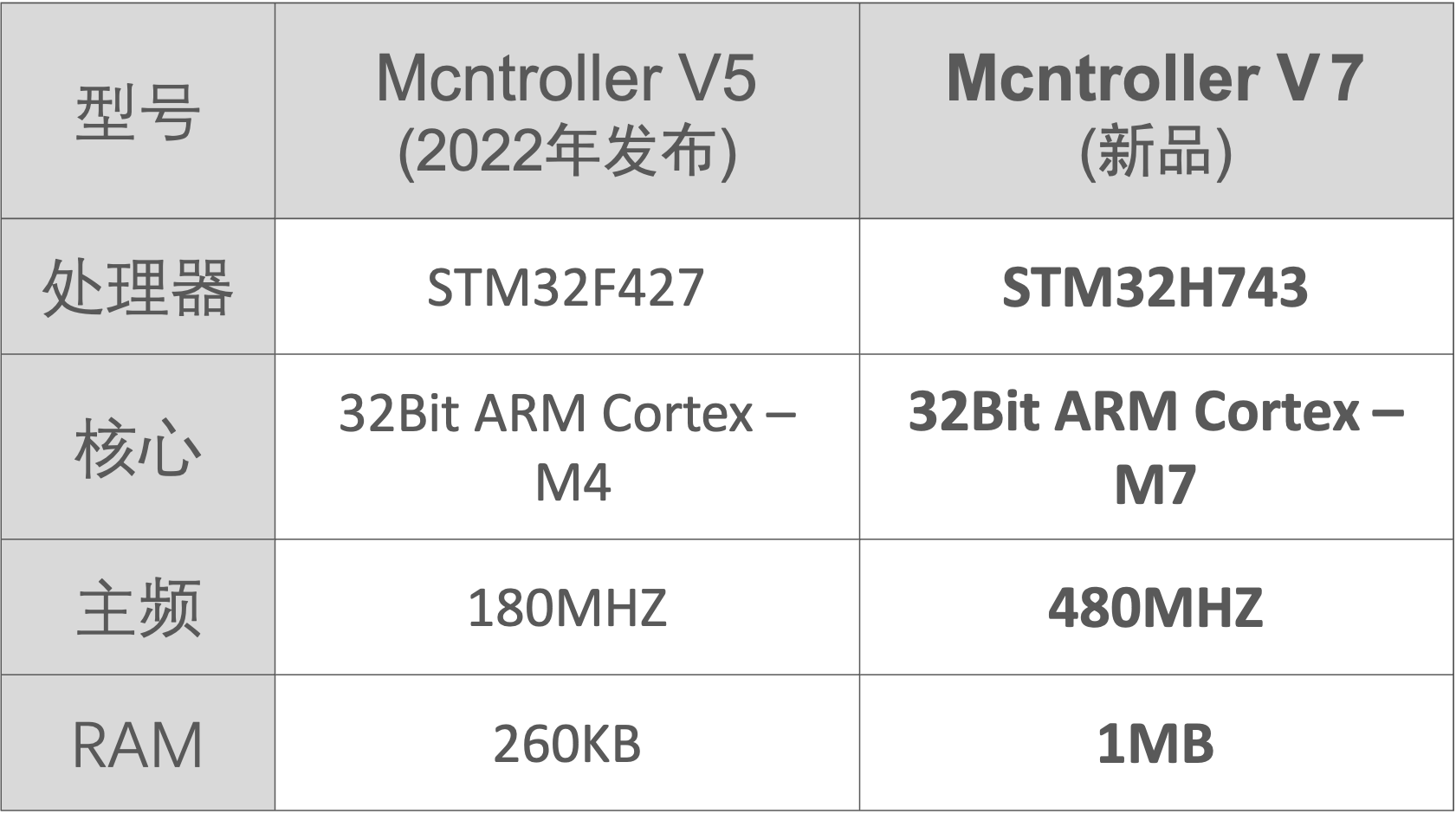
处理复杂任务时
更高效 更迅捷
全板敷铜

酷炫全包裹外壳
防静电|防灰尘
防汗渍|防油污
更多的保护
只为提供更可靠的性能
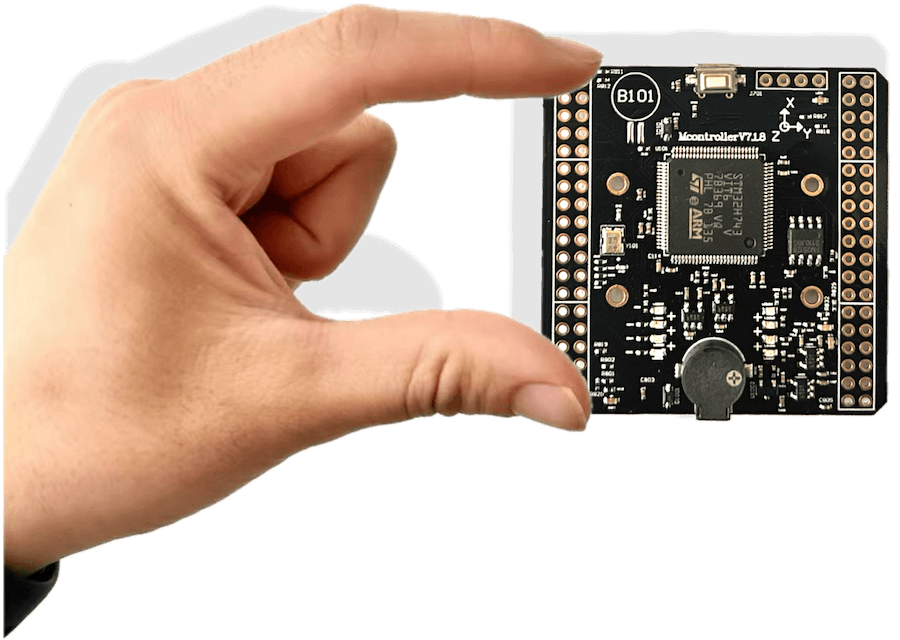
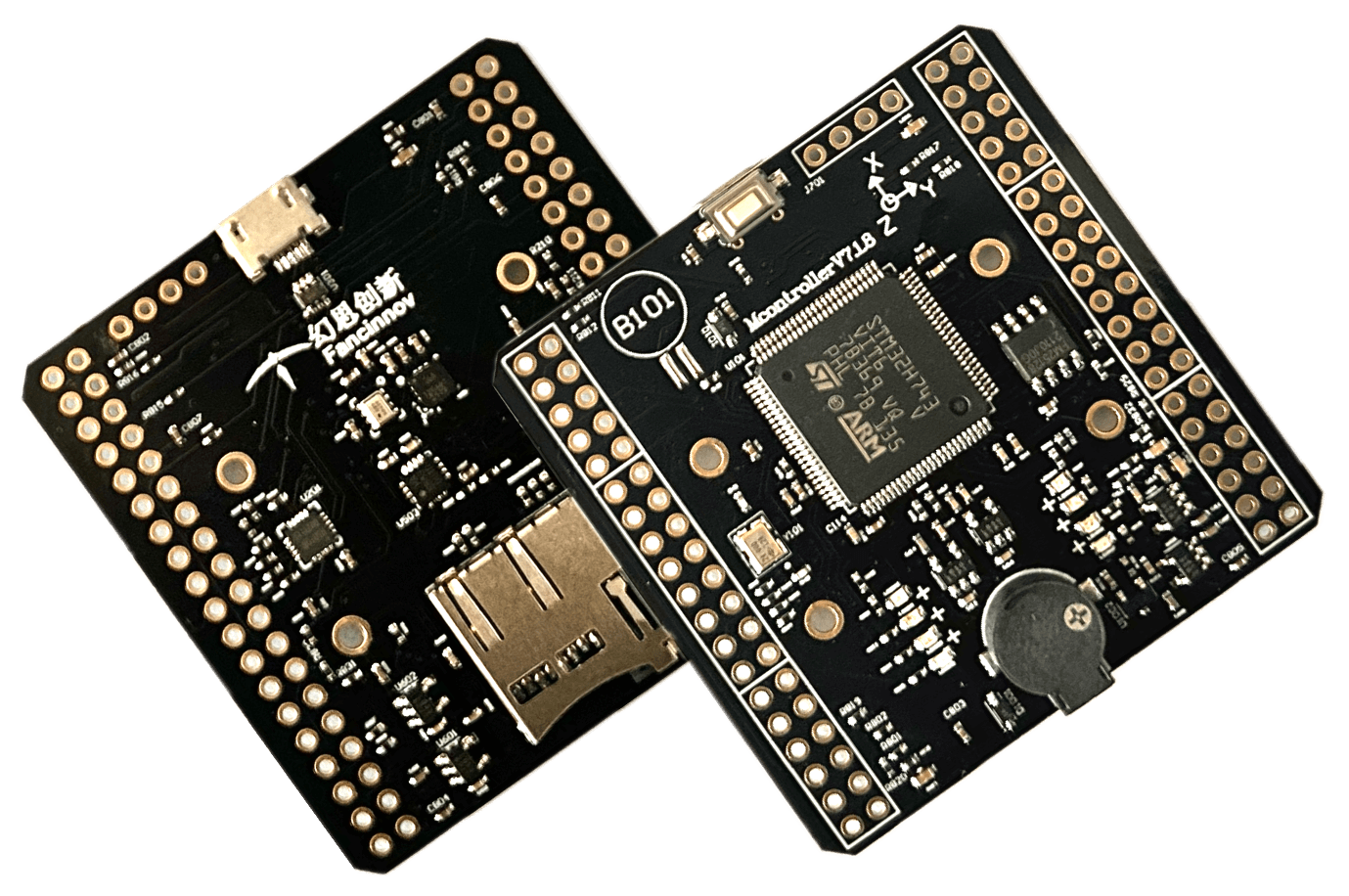
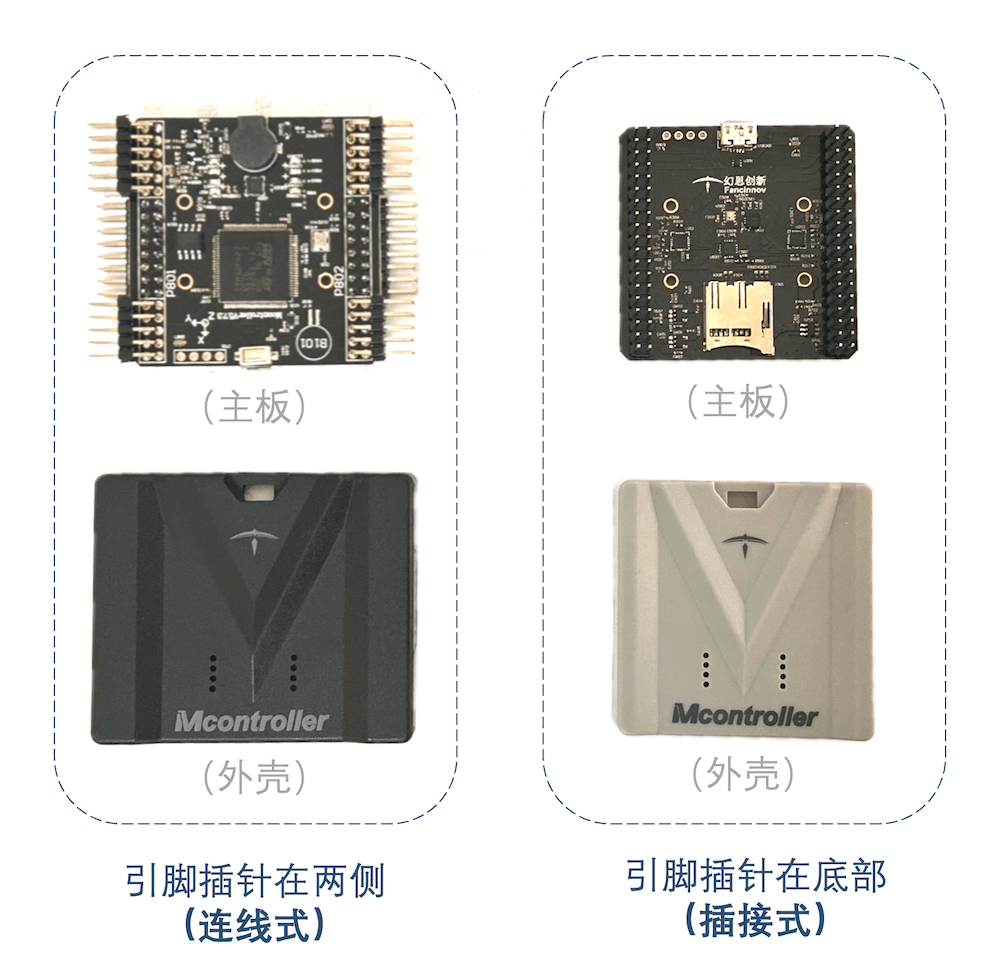
两种封装
灵活使用
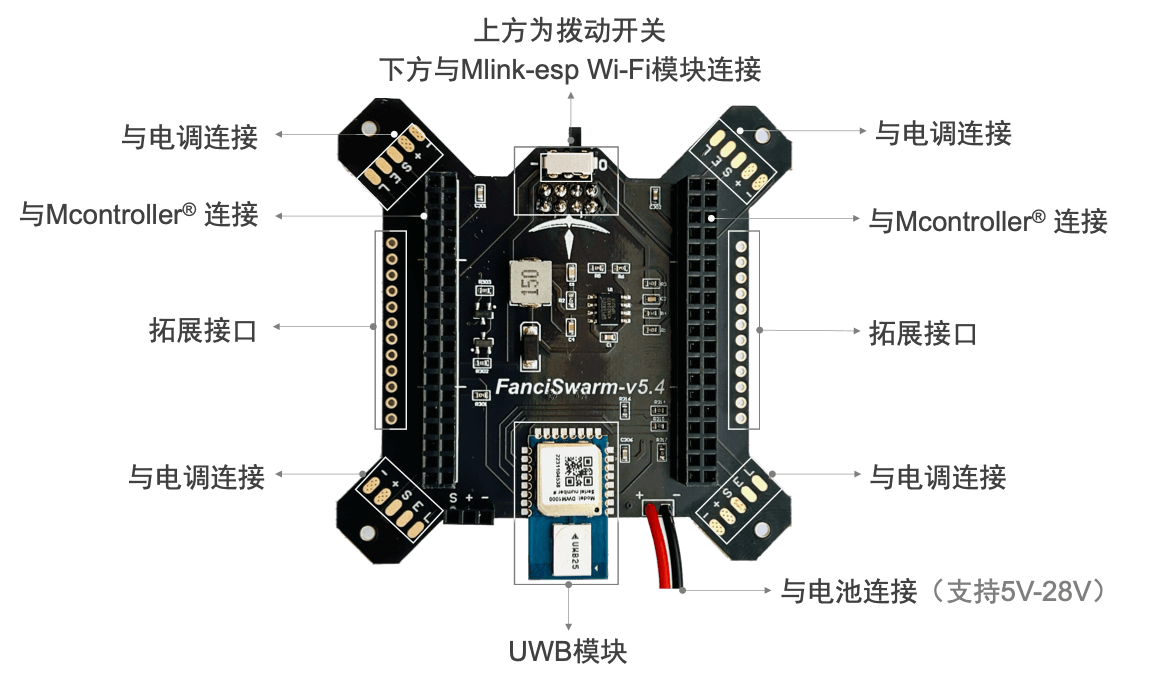
飞控扩展板
3秒即可接入
省去接线繁琐步骤
快速集成无人机/无人车项目
缩短开发周期
Mcontroller®
跨模态机器人运动控制系统
什么是跨模态机器人?跨模态机器人的概念可能由幻思创新Fancinnov® 率先提出。跨模态机器人是一种集成了多种感知、处理和执行能力,并且具备多维度(空中、地面、墙面)灵活运动能力的先进机器人系统。
具体案例:幻思创新Fancinnov® 研发的跨模态飞行机器人,主要面向工业检修、建筑物检测。该款机器人具备高度灵活性,能够在指挥控制系统的指令下,通过一键操作轻松切换至地面行驶、空中飞行或墙面爬行等多种运动模式。机器人可全自主从地面爬上墙面再重返地面,以及从空中飞上墙面再重返空中。
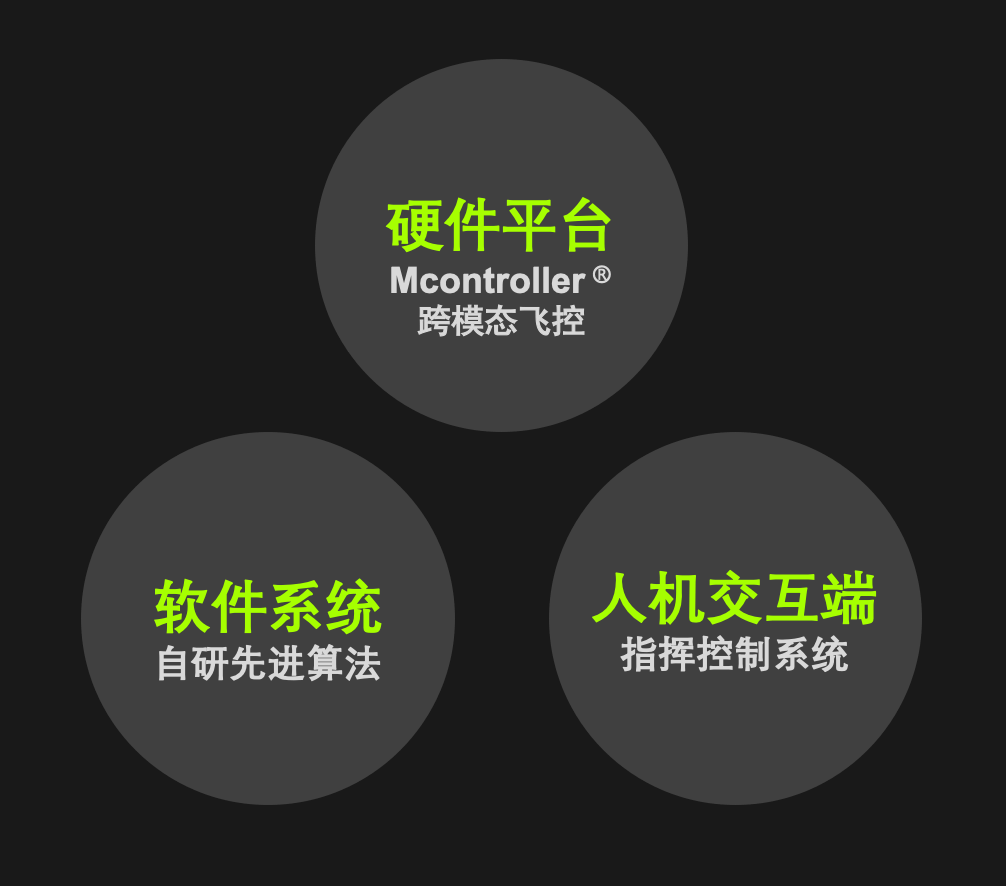
系统构成:硬件平台 + 软件系统 + 人机交互端。其中硬件平台为Mcontroller® 跨模态飞控,软件系统包括状态估计算法、多源信息融合感知算法、跨模态运动控制算法、抗扰动算法等;人机交互端包括移动端的Mcontroller App和PC端的Mcontroller ROS指挥调度系统。
跨模态机器人运动控制系统
两年迭代
上百万行代码|数百次迭代
数千小时飞行验证
多项发明专利授权
多个国家级竞赛奖项
硬件设计|驱动层|软件层
牢牢掌握在幻思创新手中
自研状态估计算法
自研跨模态控制算法
自研抗扰动算法
…
全效加持Mcontroller®
从底层驱动到上层应用
每一行代码都是自主的
共同构成其高效稳定的架构
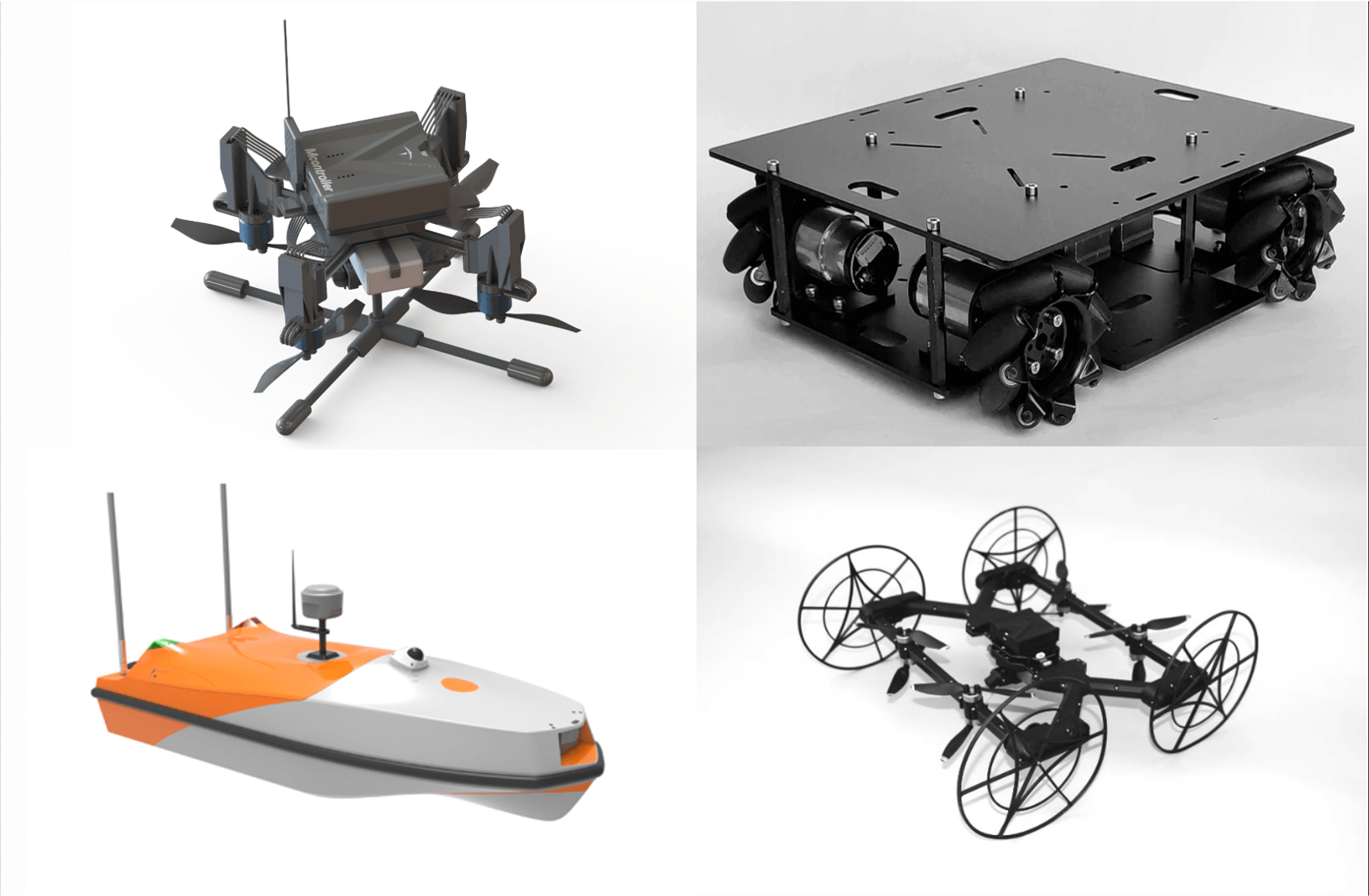
一个 Mcontroller® 就搞定
空中飞行机器人|地面移动机器人
水面移动机器人|跨模态机器人
跨模态飞行机器人可实现
空中、地面和墙面的精准转换

无数次的测试、调整和优化
确保其在各种条件下的
架构清晰易懂
模块化设计、详细的注释
更安全|更易维护|更易扩展
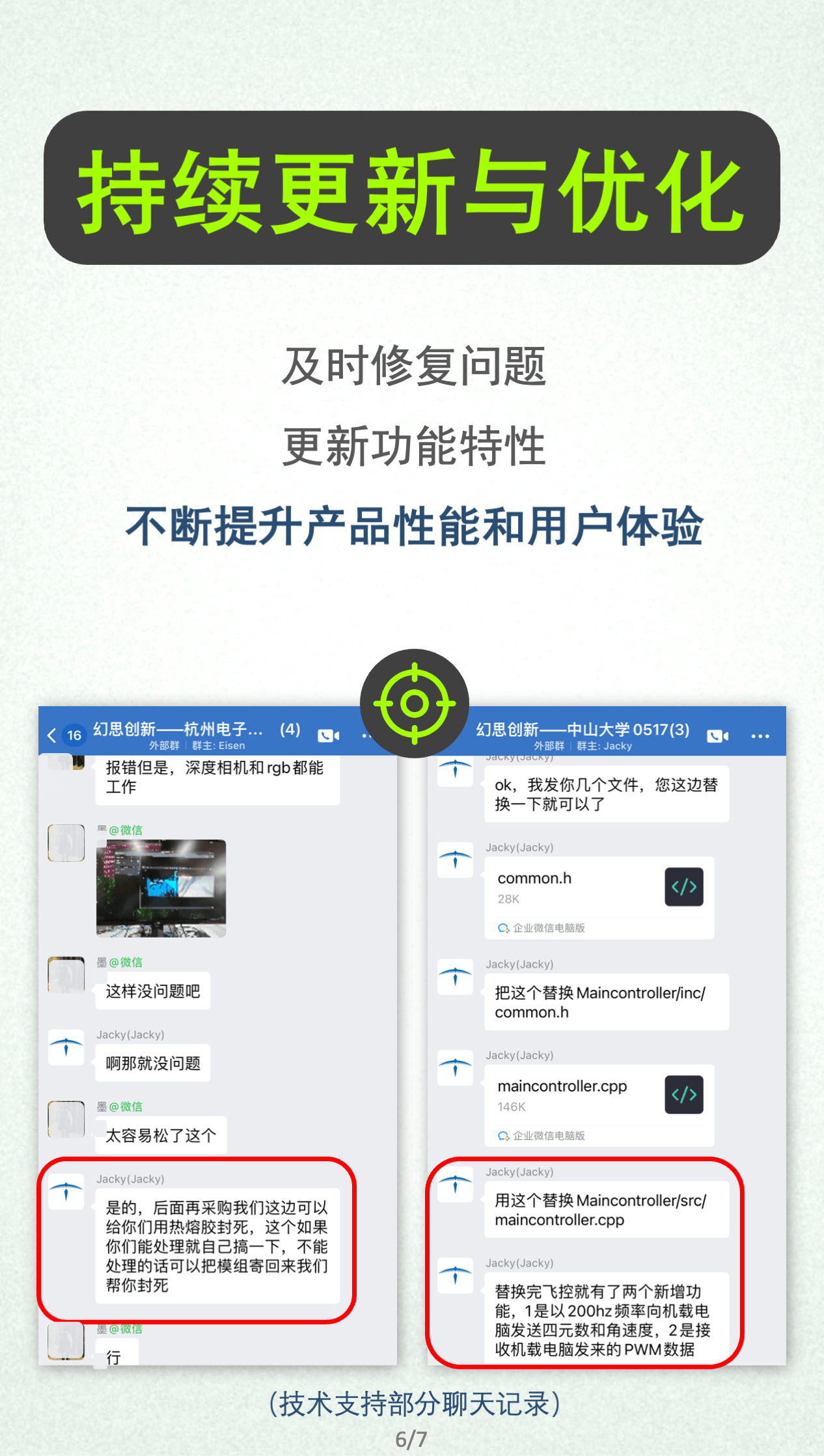
Mcontroller® 还会持续得到
各项能力的提升
两年迭代
数千小时飞行验证
授权多项发明专利
落地多款产品和数十个优质项目
全自研跨模态机器人运动控制系统
![]()

多重安全保护机制
撞击保护|倾倒保护
信号丢失保护
电量过低保护
最大高度限制
…
配套Demo源码和应用案例
轻松构建多种无人控制平台
无人机|无人车|无人船|机器人
开发便捷 快速集成
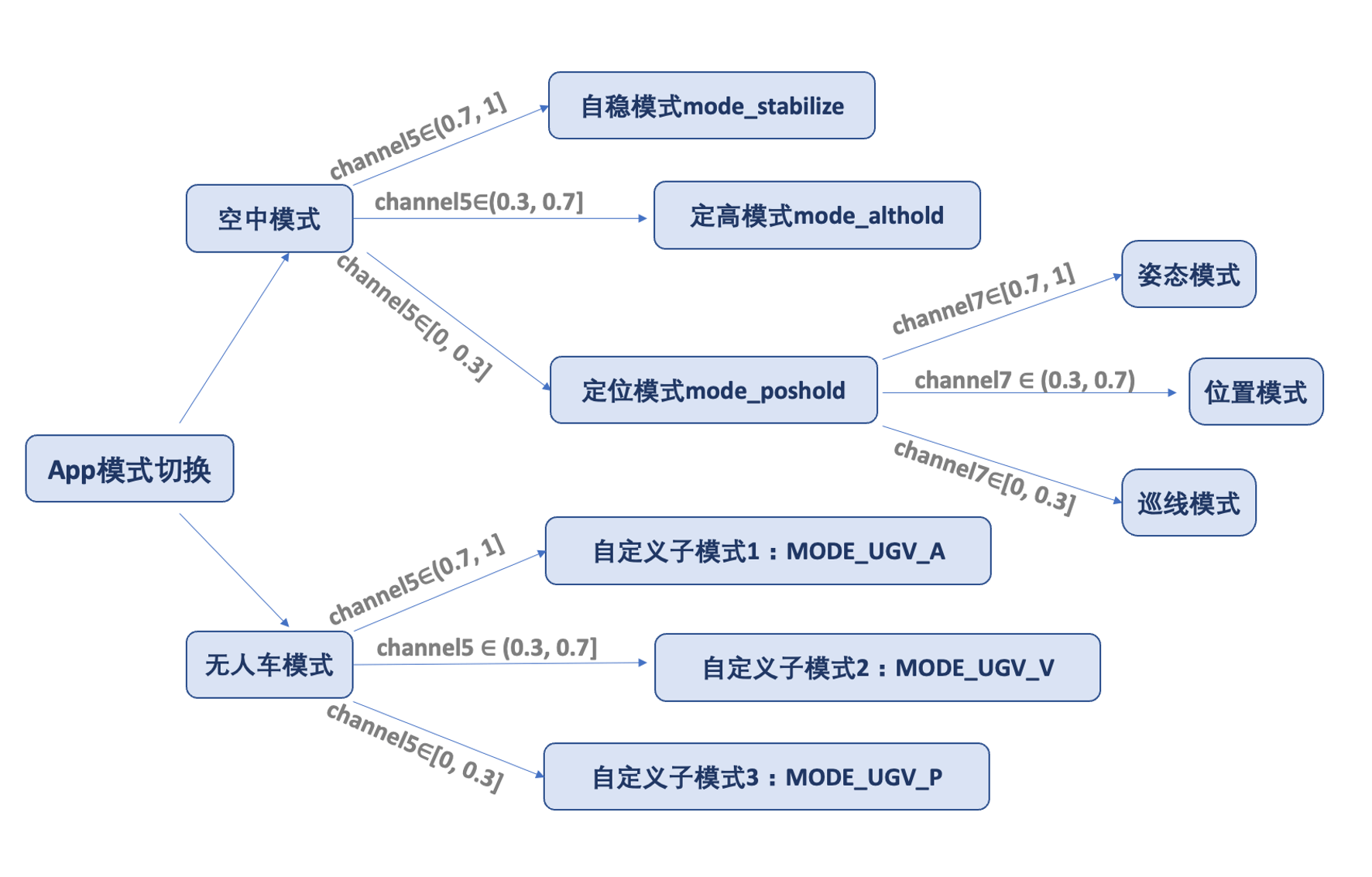
支持全方位飞行模式
自稳|定高|定点
任务航点|自动返航
一键起飞|一键降落
自主飞行|轨迹飞行|集群飞行
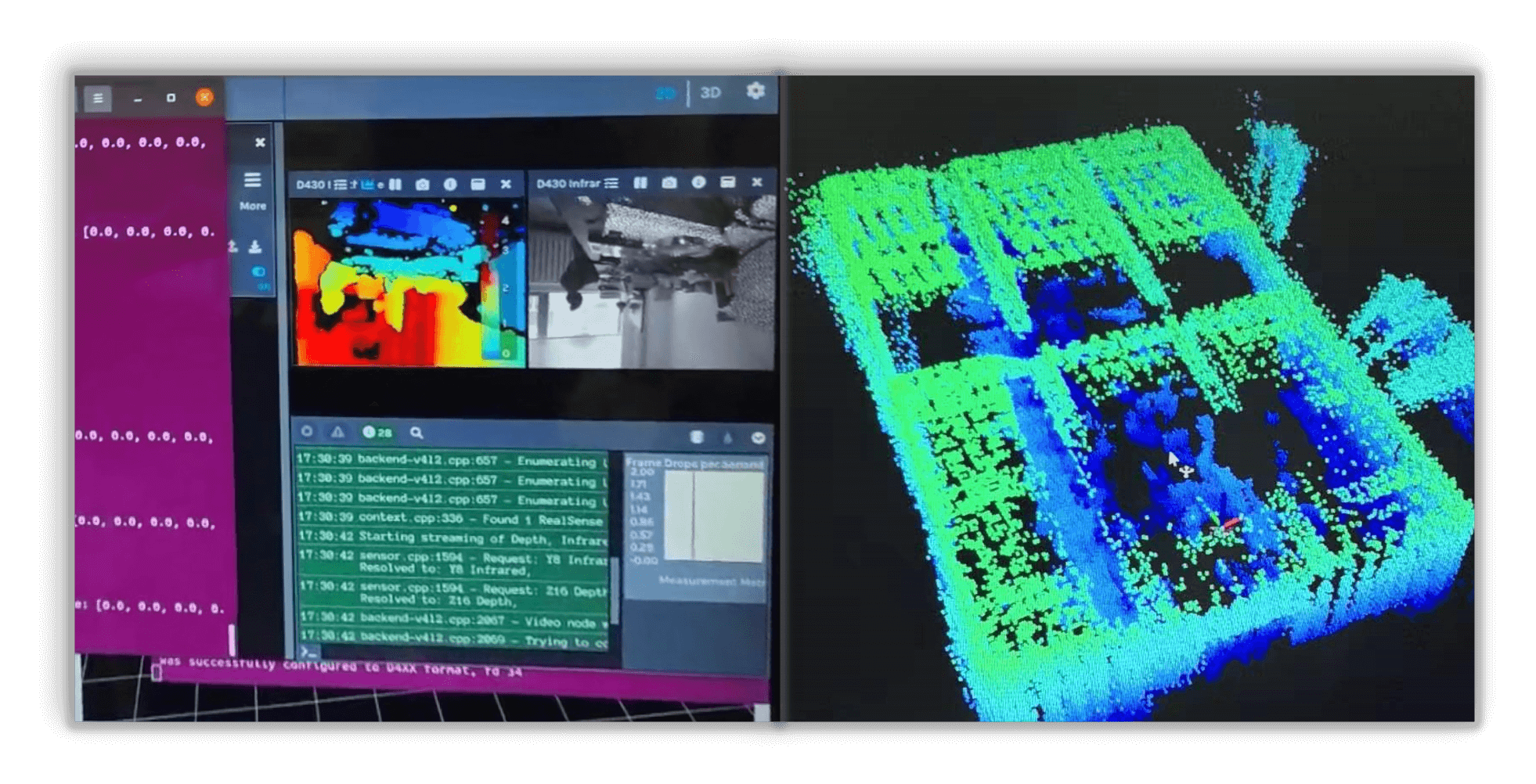
支持与机载计算机高效稳定通信
激光雷达|深度相机|RGB相机
保障飞行控制的精准高效
为自主定位与导航保驾护航
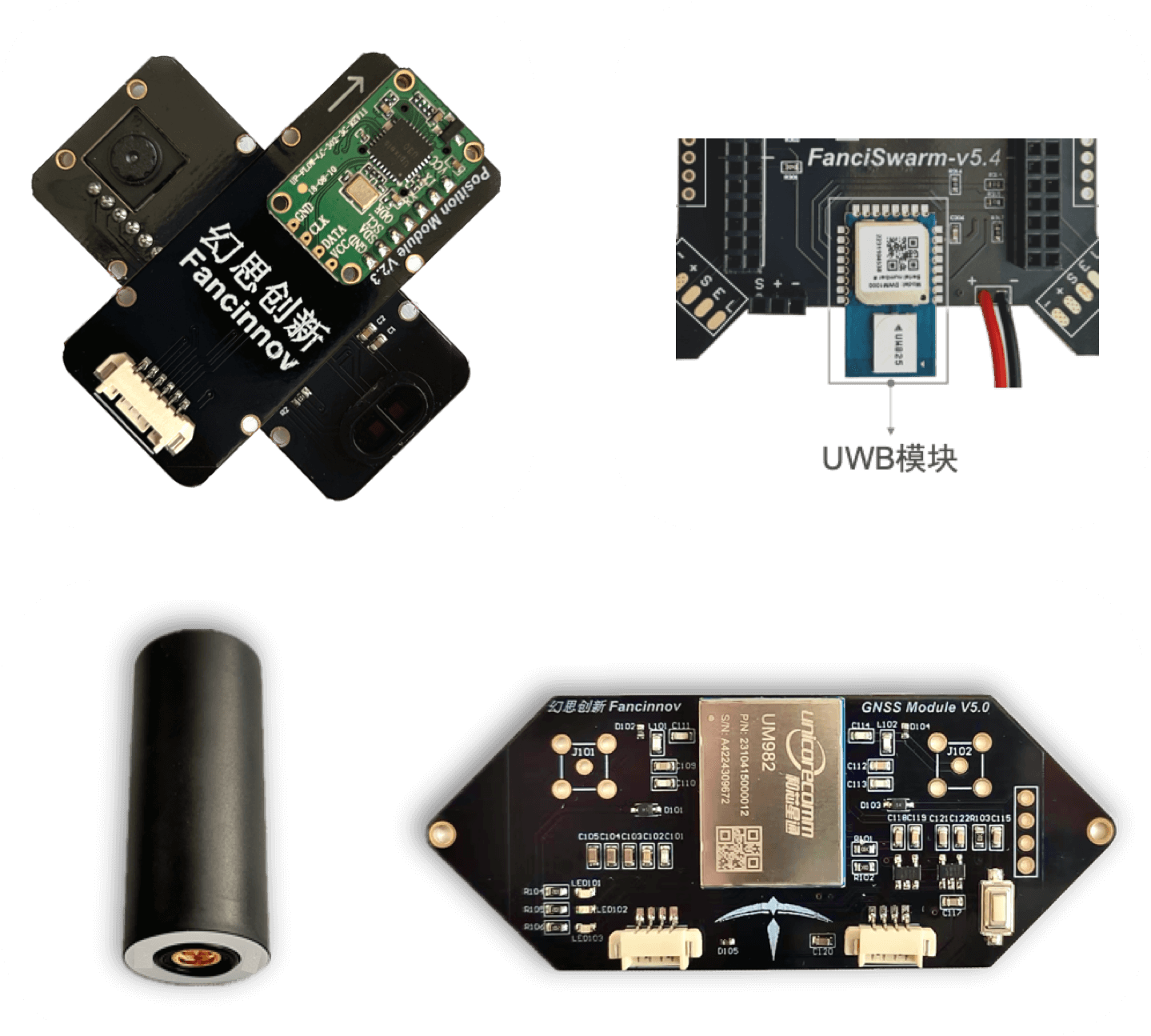
多种定位方式
配套驱动和使用demo
快速集成 高效完成
光流定位|激光测距
视觉里程计|动捕系统
GNSS| SLAM | UWB |RTK
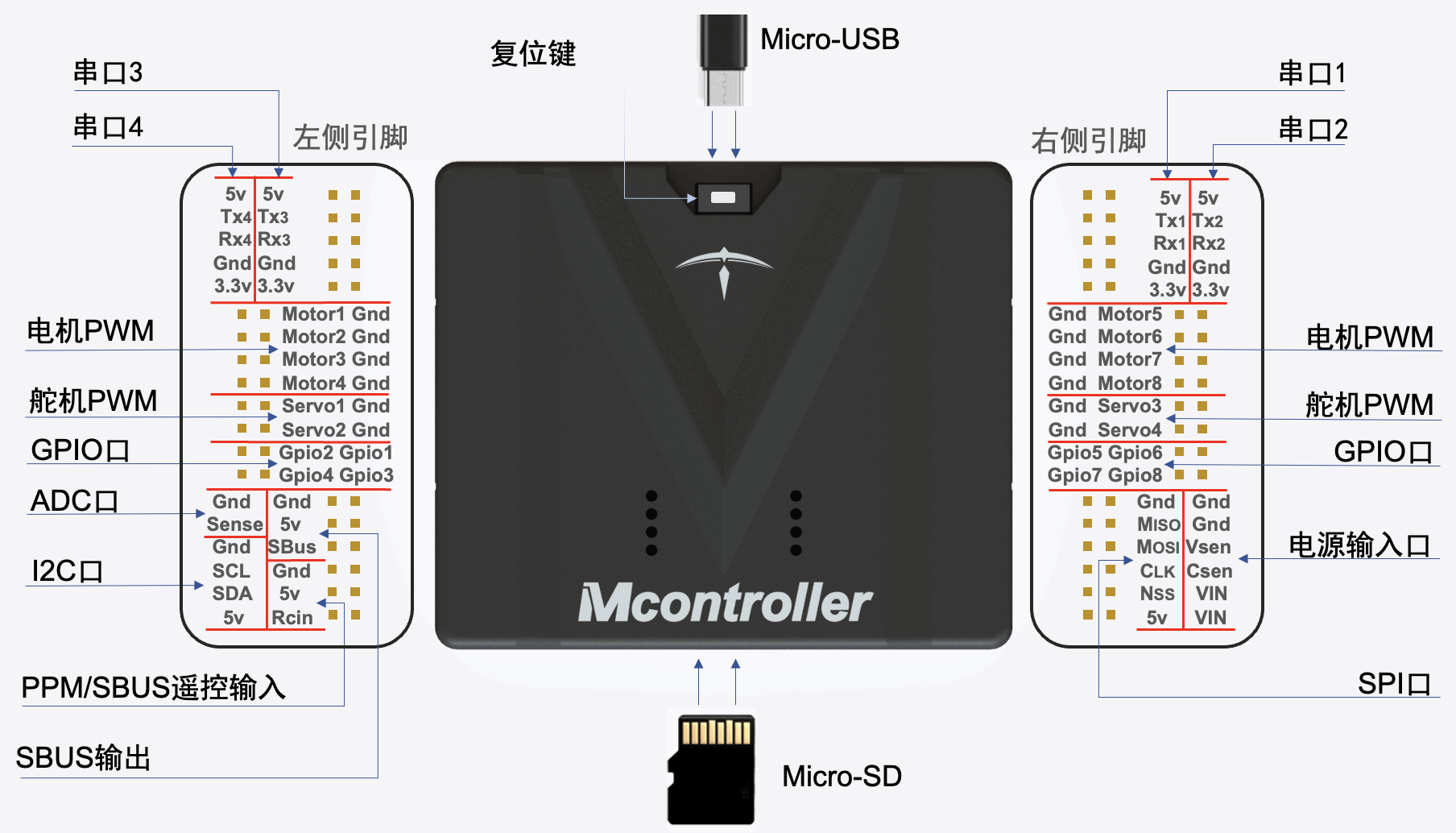
兼容多种通信
灵活适应不同环境和需求
MavLink |ROS
UART|SPI|I2C|CAN
SBUS|PPM|USB|UWB|WiFi
顺畅无线连接
支持多平台轻松控制
手机|Pad|工控机|电脑|遥控器
支持接入各种
传感器、执行器和外部计算设备
快速集成 高效完成
图传|数传|机载计算机
电调|电机|激光雷达|深度相机
舵机| GNSS | UWB |RTK
光流|激光测距传感器
···
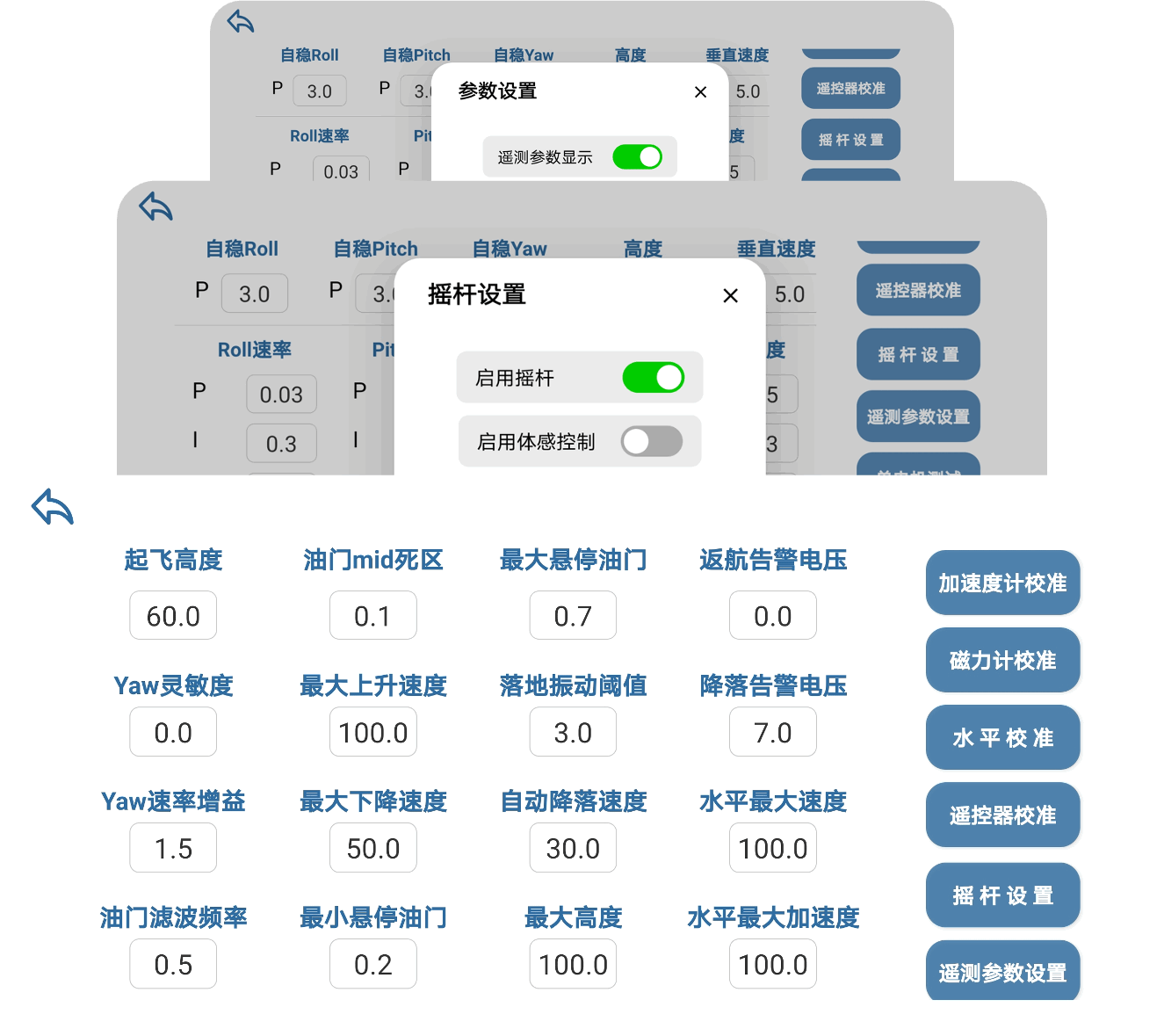
配套多功能App
简单操作
轻松实现快捷调参
让飞行控制更便利、更有效率
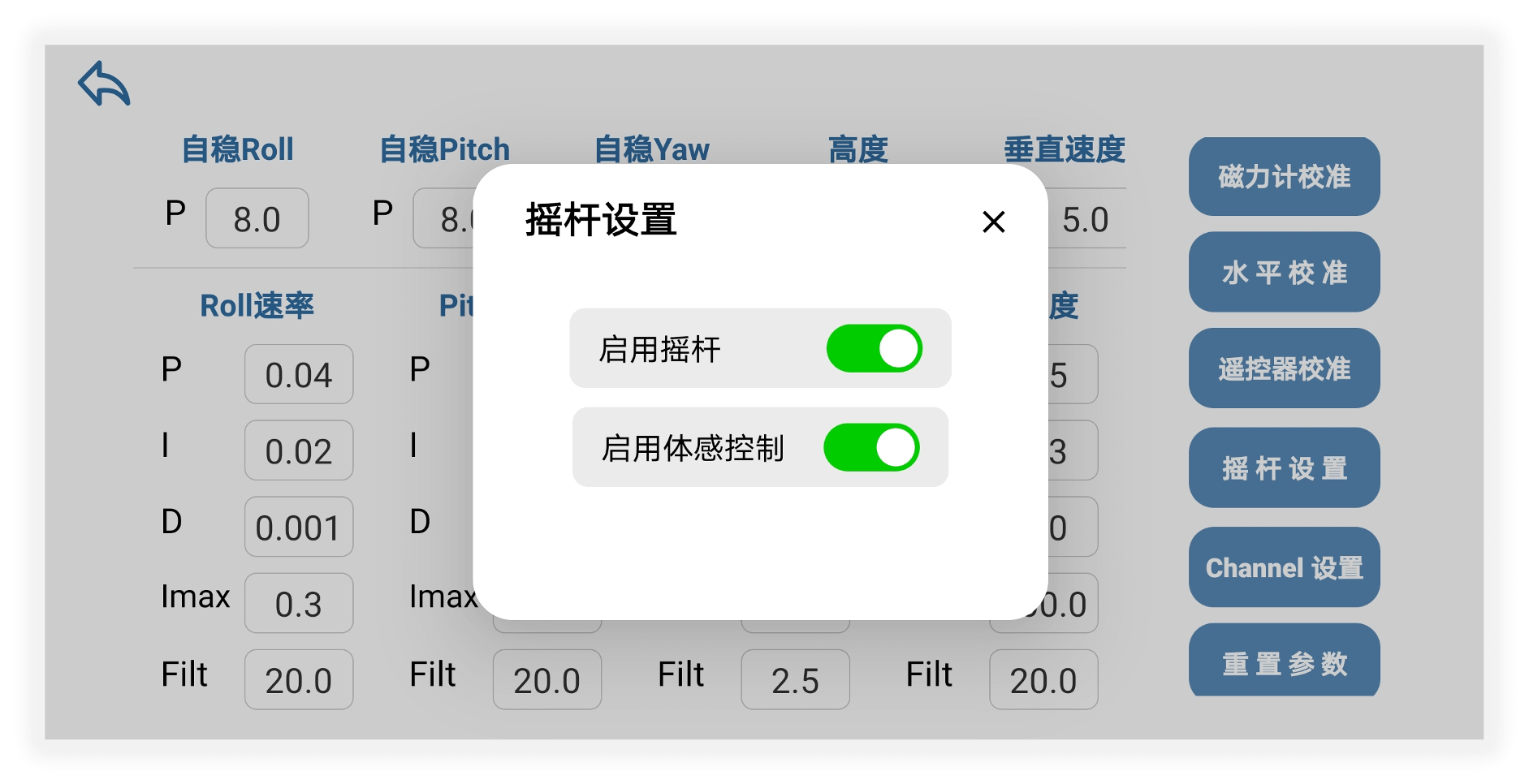
配套Mcontroller® App
参数实时配置,状态精准监测
体感遥控,实时图传
支持个性化飞行体验
为实验提供精确的数据支持
轻松自定义控制算法
便于根据研究目标开发特定控制策略
精准记录数据
便于后续的数据分析和研究
开发平台
多种移动模式控制
软件开源—快速部署
广泛的硬件兼容性—快速集成
全自研跨模态系统架构
高效可靠易开发

是飞行与移动控制研究的得力助手
支持验证理论模型和控制策略
支持前沿的控制理论和算法研究
持续推动飞行控制和移动机器人
技术创新

开发资源
15种板载硬件资源|13类传感器数据
9种函数库|主控算法Demo
详尽的开发文档
好用的开发工具
丰富的案例Demo 大大简化开发流程
卓越的灵活性
高度的兼容性
模块化设计
易于使用的开发工具和API
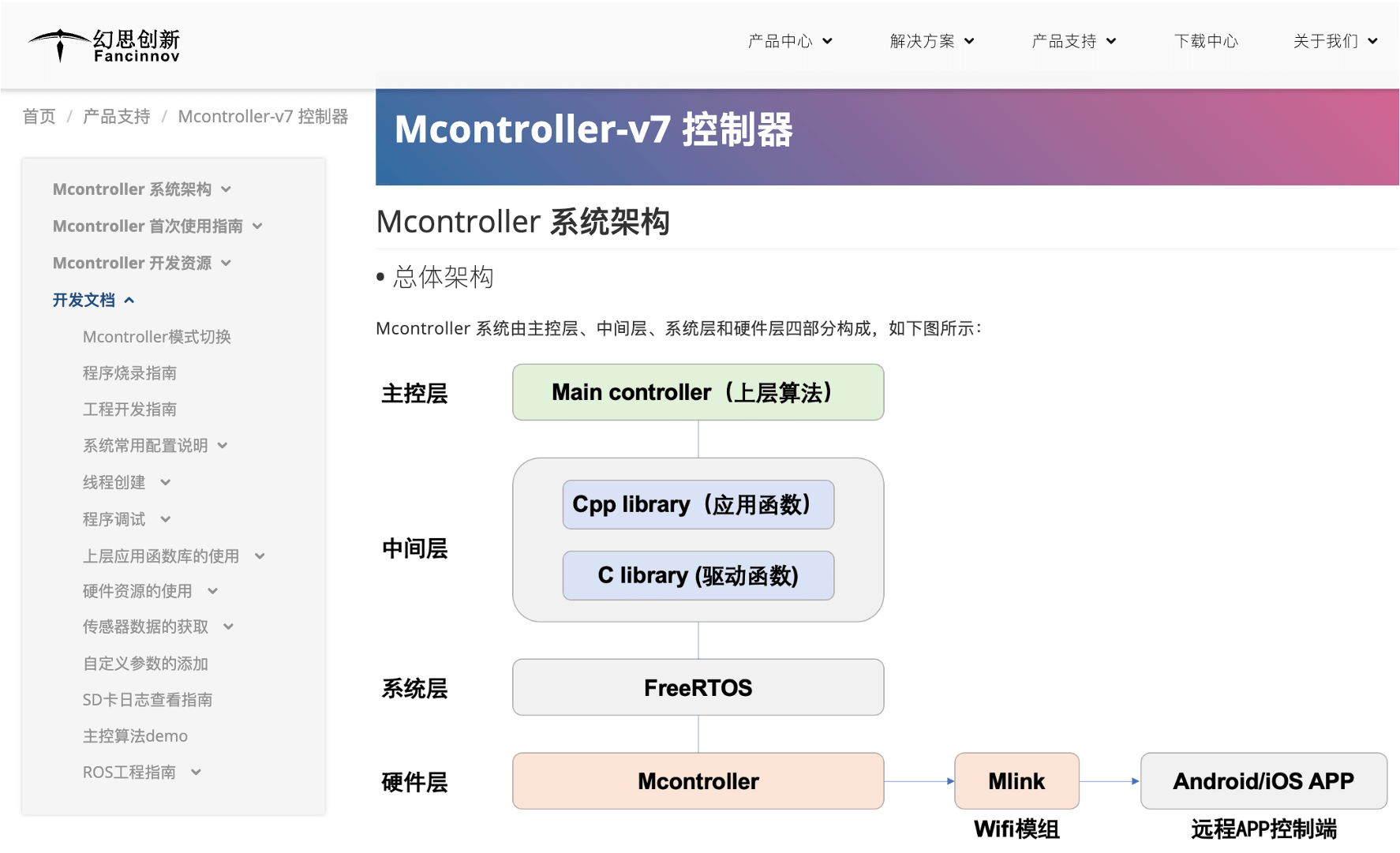
全自研跨模态系统架构
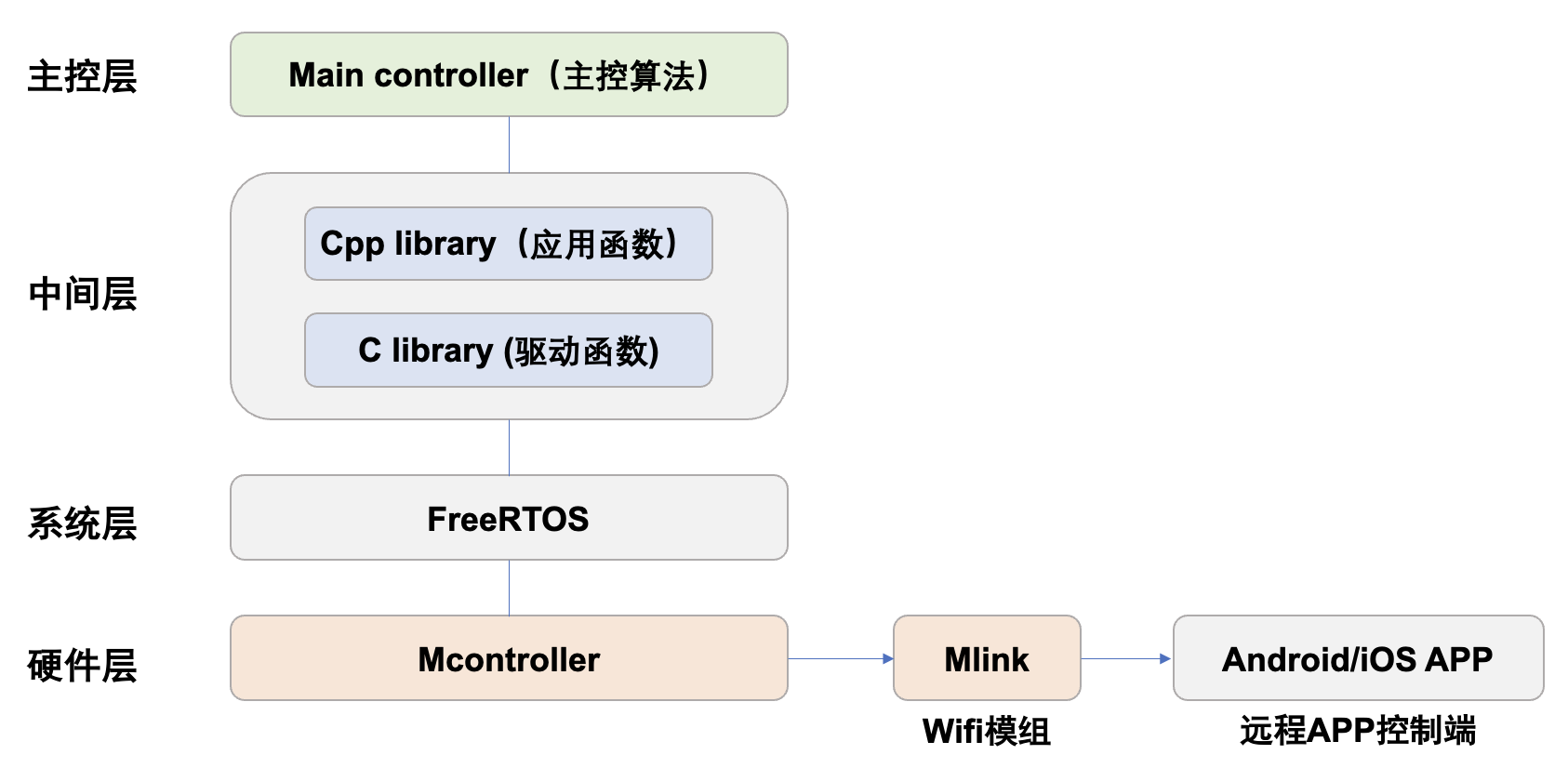
系统层级分明
架构清晰易懂
配套详尽的教程和案例Demo
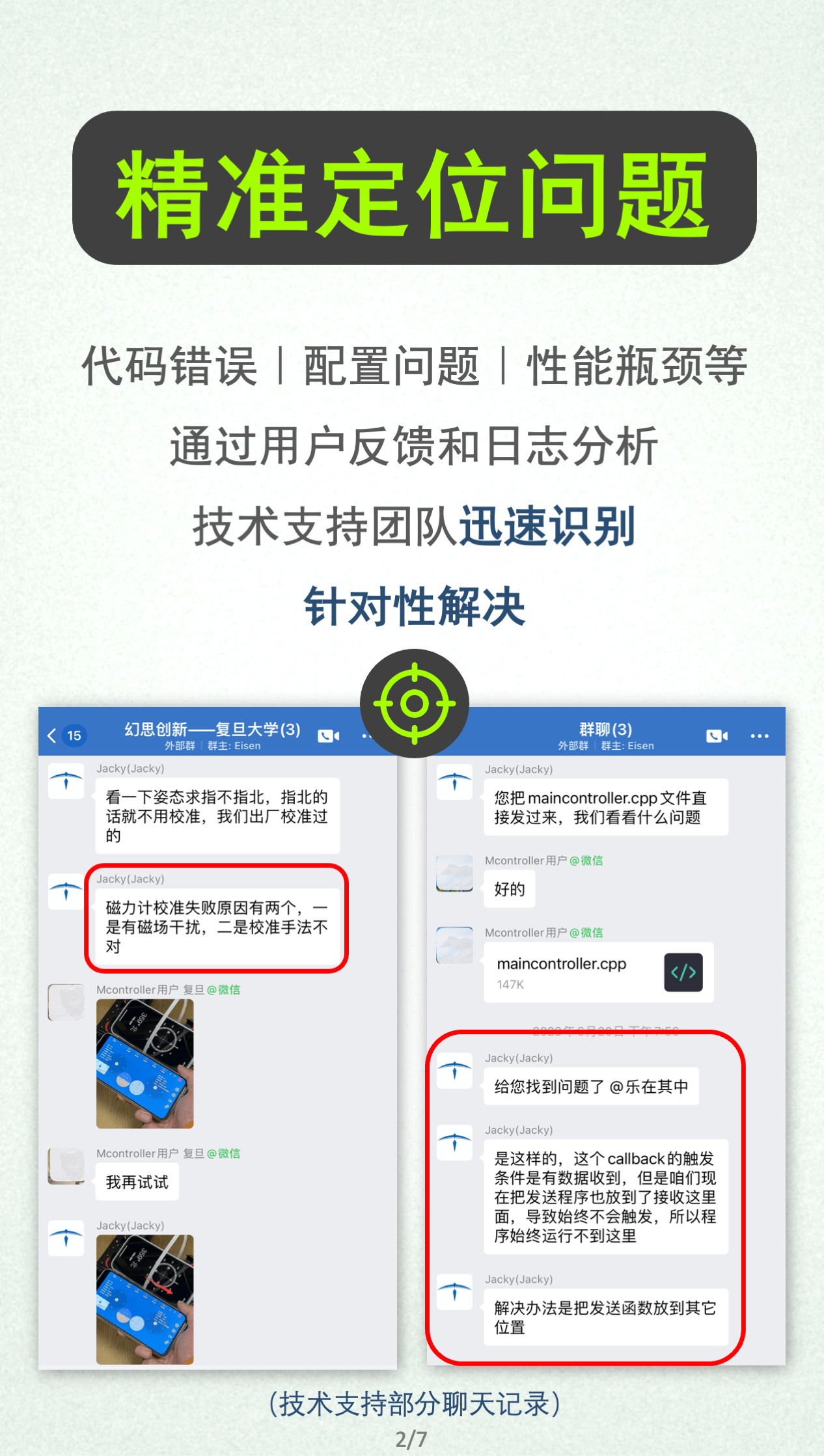
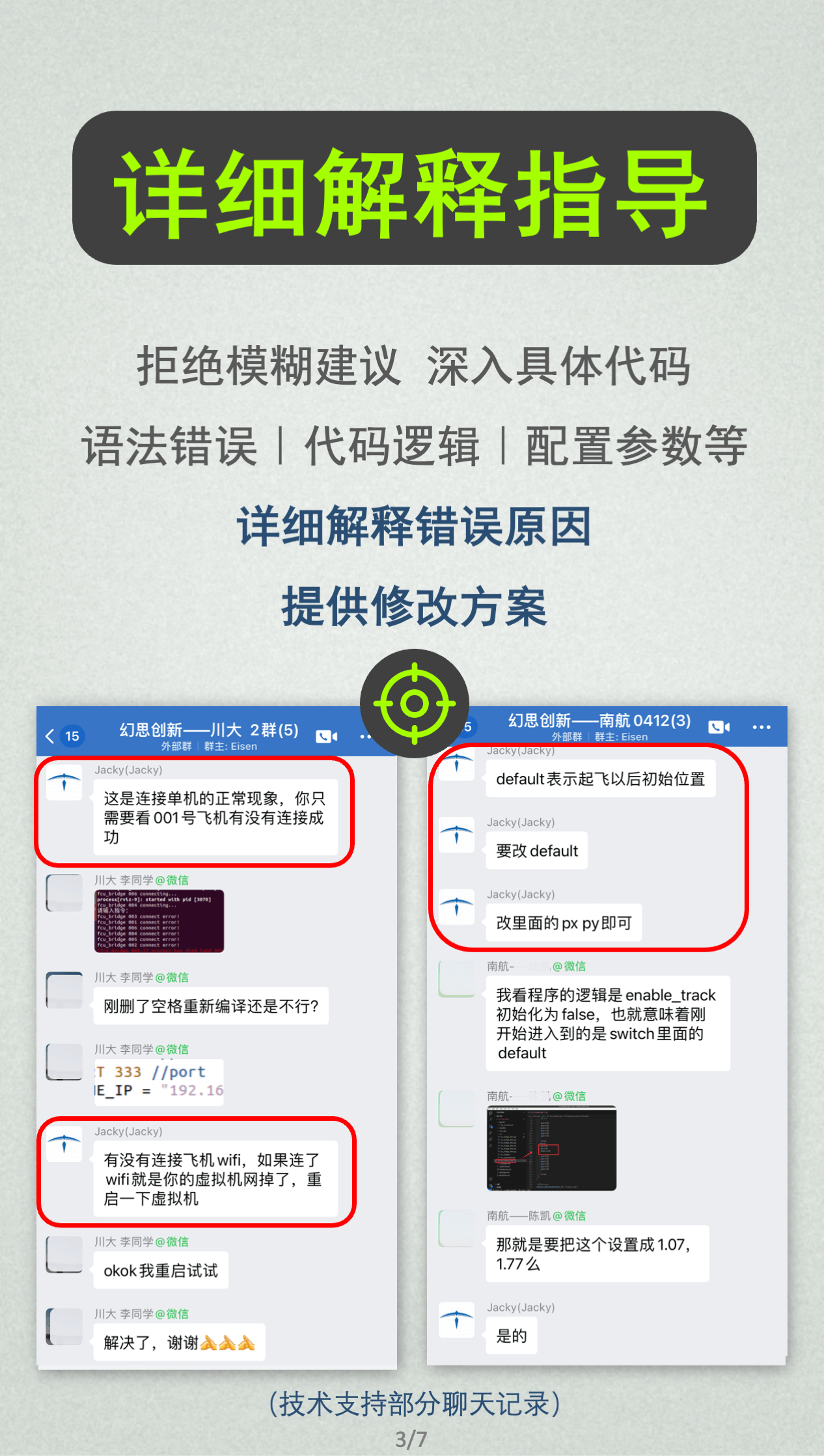
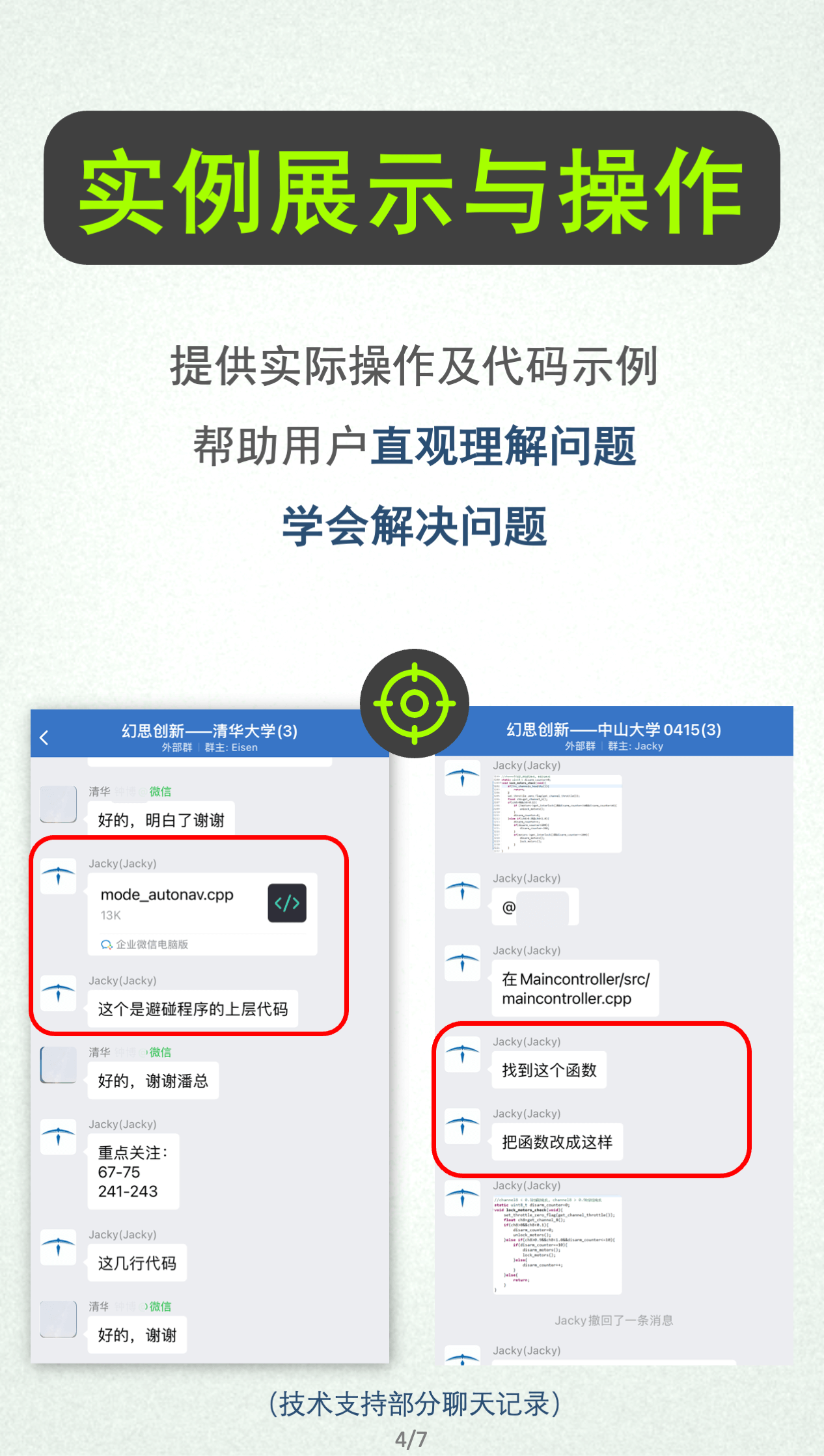
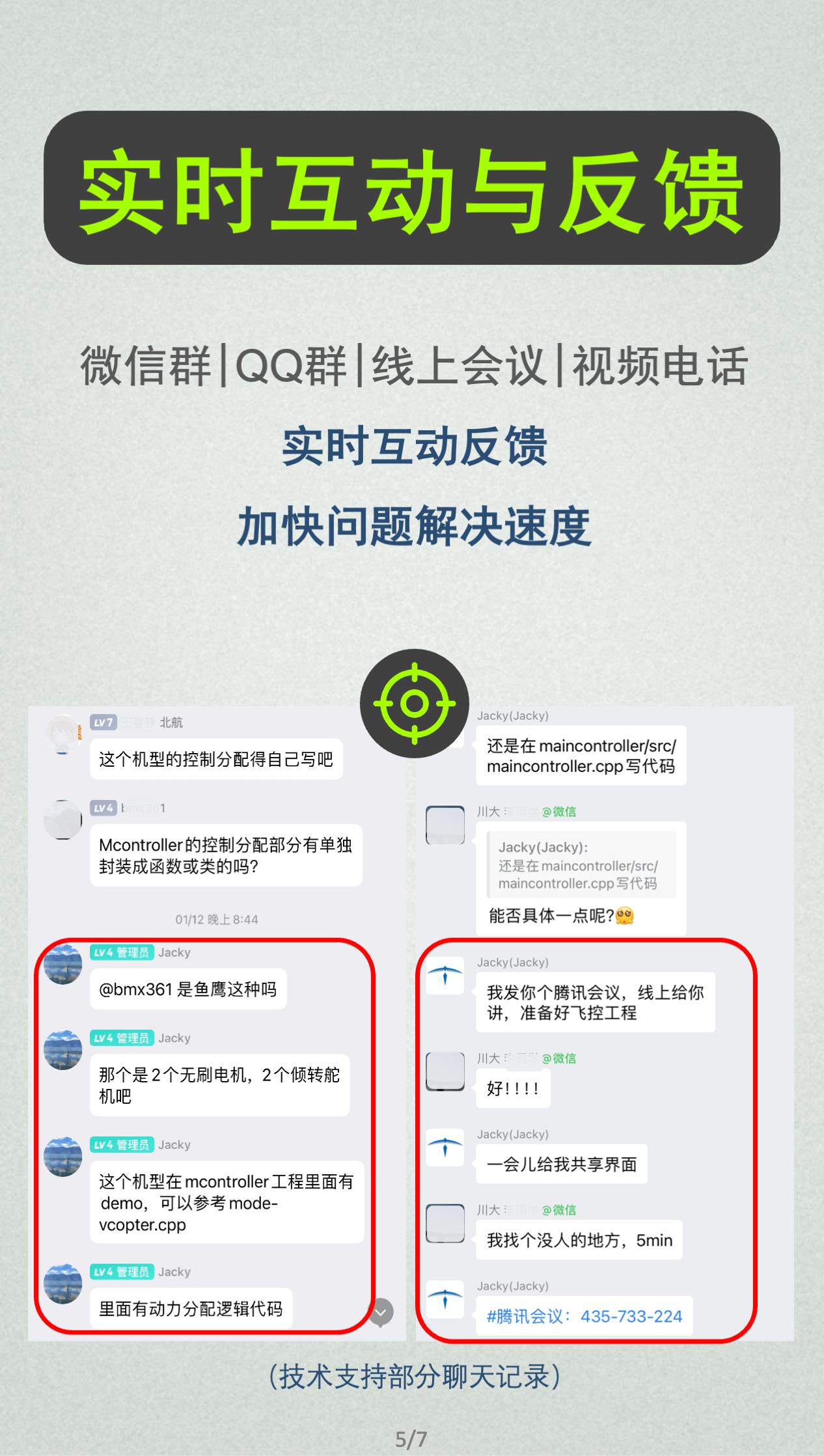
具体到一行代码的技术支持
App快速便捷调参
所见即所得
开发效率++
文字、图片、视频全方位指导
易于学习—初学者也能够快速上手
系统性指导—从基础到高级
实践结合理论—配套示例项目
社区互动与交流—知识共享经验交流
地面站App—用户体验++
高精度的控制|广泛的兼容性
集成多种控制模式和先进算法
完善的售后服务和技术支持
无论是项目还是产品
支持全方位定制


![]()