FanciSwarm™ 高级开发指南
高级开发指南 —— FanciSwarm™ 系统架构
• 总体架构
FanciSwarm™ 系统基于Mcontroller® 系统,由主控层、中间层、系统层和硬件层四部分构成,如下图所示:

• FreeRTOS
FreeRTOS是实时操作系统,负责管理Mcontroller的多线程调度。
FanciSwarm™ 的所有线程调度程序都在工程的/Core/Src/freertos.c文件中。主控层、中间层中的所有函数必须加载到freertos.c的线程调度函数中才能运行。
• Main controller
Main controller是系统的核心控制层,采用C风格的Cpp语言编写。
所有的上层控制函数都在Maincontroller/src文件夹中,可以直接在该文件夹中新增自己的上层控制算法,实现自定义功能。
高级开发指南——FanciSwarm™ 开发资源
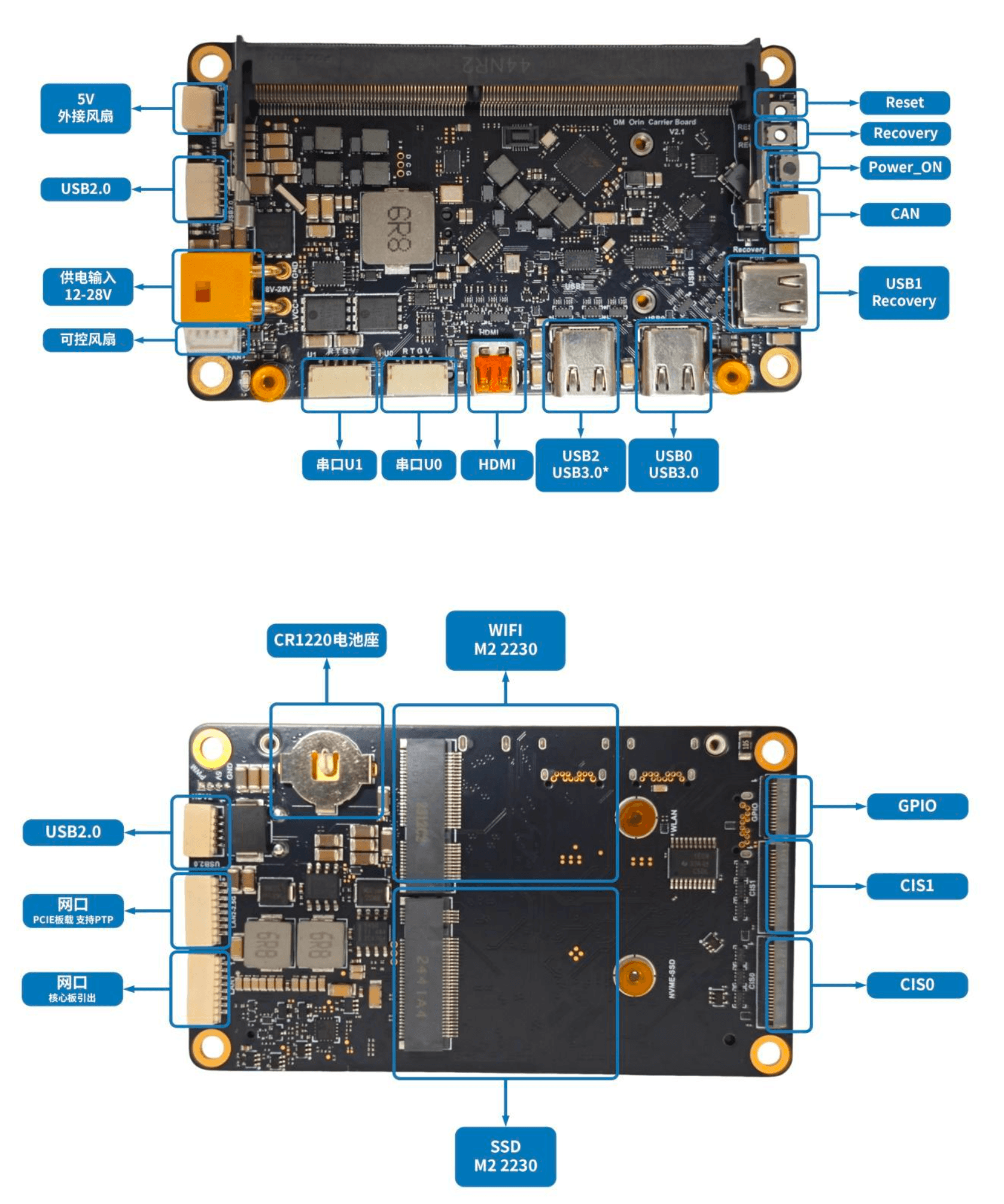
• Mcontroller® 板载硬件资源
Mcontroller® 的板载硬件资源包含14种,可在“Mcontroller® 板载硬件资源的使用”一节查看其使用方法。如下图所示:
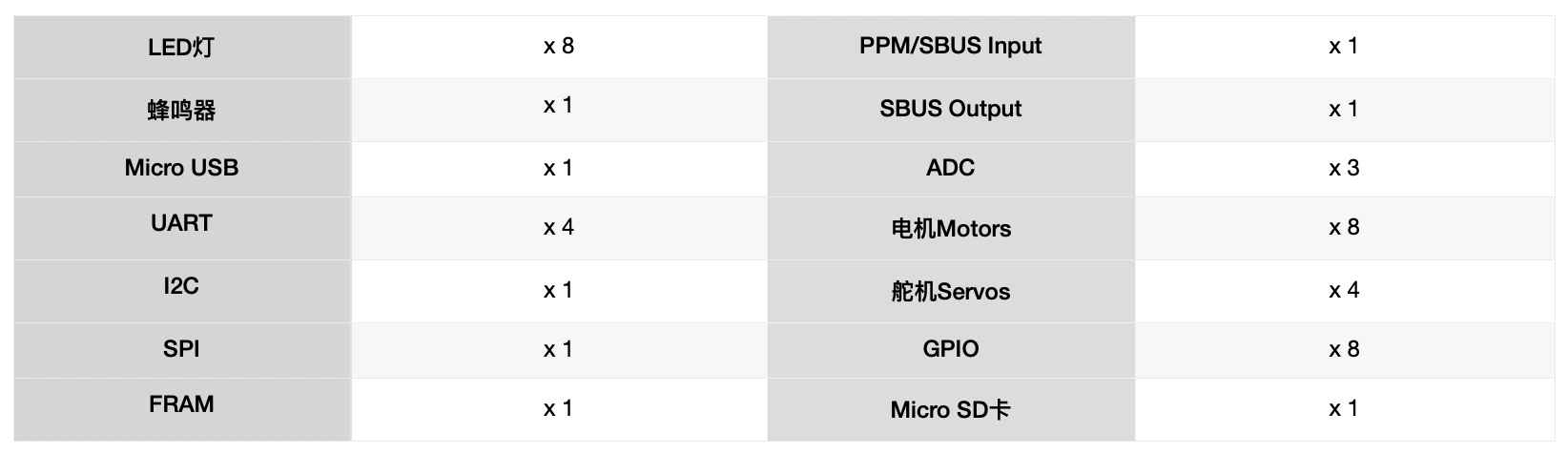
• 飞控扩展板硬件资源
飞控扩展板的板载硬件资源包含6种,可在“飞控扩展板硬件资源的使用”一节查看使用方法。如下图所示:

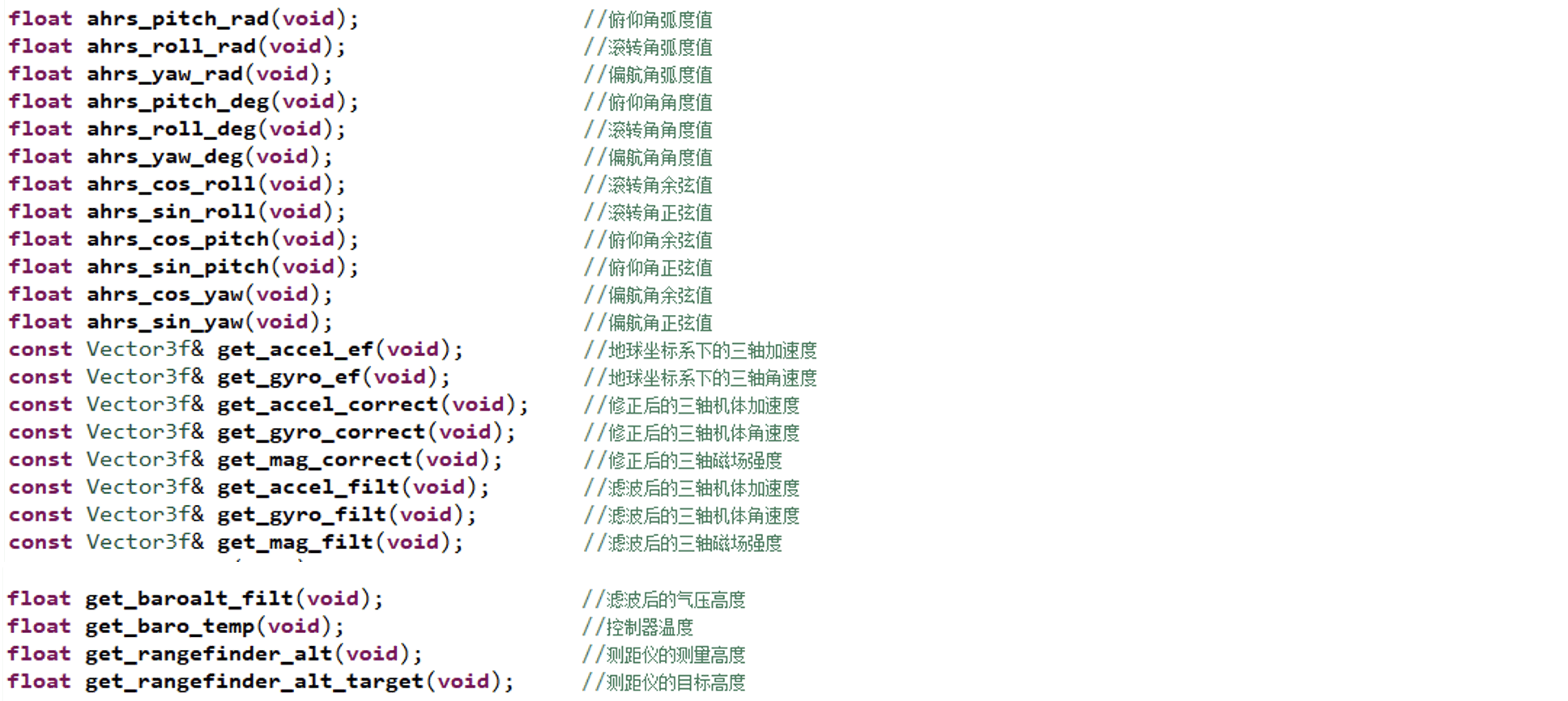
• 传感器数据
FanciSwarm™ 的传感器数据包含13类,可在开发文档中查看其获取方法。如下图所示:

• 上层应用
FanciSwarm™ 的上层应用包含9种函数库,可在Maincontroller/src文件夹中查看。如下图所示:

• 主控算法
FanciSwarm™ 的主控算法包含定高飞行(姿态模式)、定点飞行(位置模式)和自主飞行,可在“主控算法demo”一节查看算法demo。
高级开发指南——工程开发指南
使用STM32CubeIDE(点击下载,提取码: hqyv)对FanciSwarm™ 进行工程开发,Mcontroller-v7-FanciSwarm 固件工程(请下载FanciSwarm®固件及依赖包,请勿下错)(点击下载)的导入步骤分为以下7步。
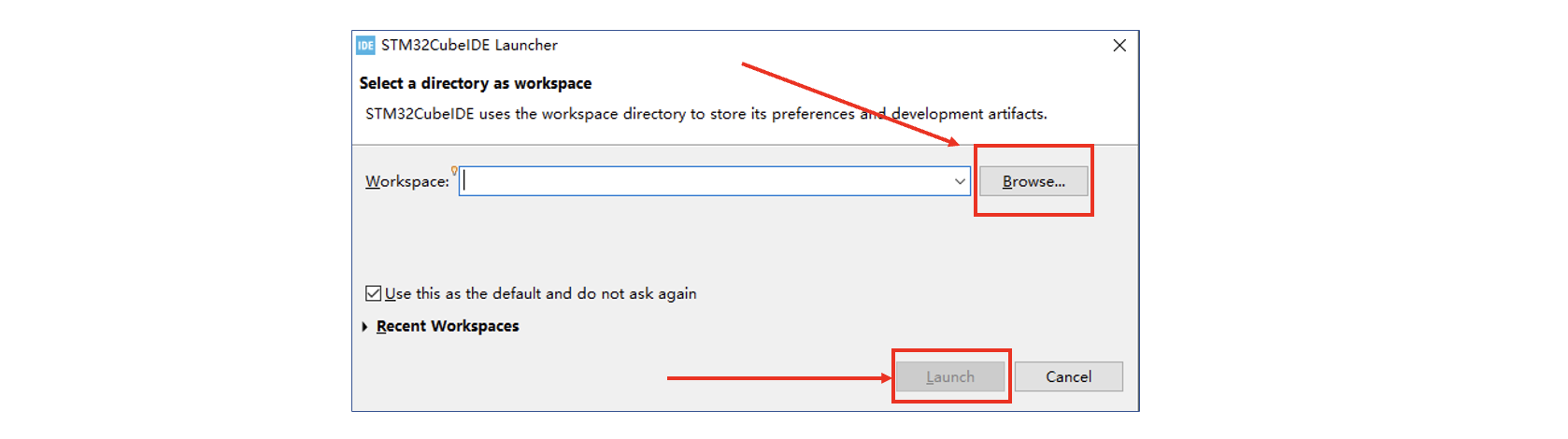
1、选择工作区
打开STM32CubeIDE,选择一个文件夹作为STM32CubeIDE的工作空间,如果没有可以新建一个。如下图所示:
2、添加Mcontroller-v7-FanciSwarm 固件
(1)选择好工作空间后,点击Launch,启动STM32CubeIDE ,并把从幻思创新官网或从GitHub/Gitee上下载好的“Mcontroller-v7-FanciSwarm 固件”压缩文件解压后(文件夹名称:Mcontroller-v7-FanciSwarm-main),添加到工作空间文件夹中。
(2)从幻思创新官网下载Mcontroller-v7-FanciSwarm 依赖包(无需解压,点击下载),并将该依赖包添加到"Mcontroller-v7-FanciSwarm-main"工程目录下,如下图所示。如果该工程目录下存在libMcontroller-v7-FanciSwarm.a,需要将原有的libMcontroller-v7-FanciSwarm.a文件替换为最新版。

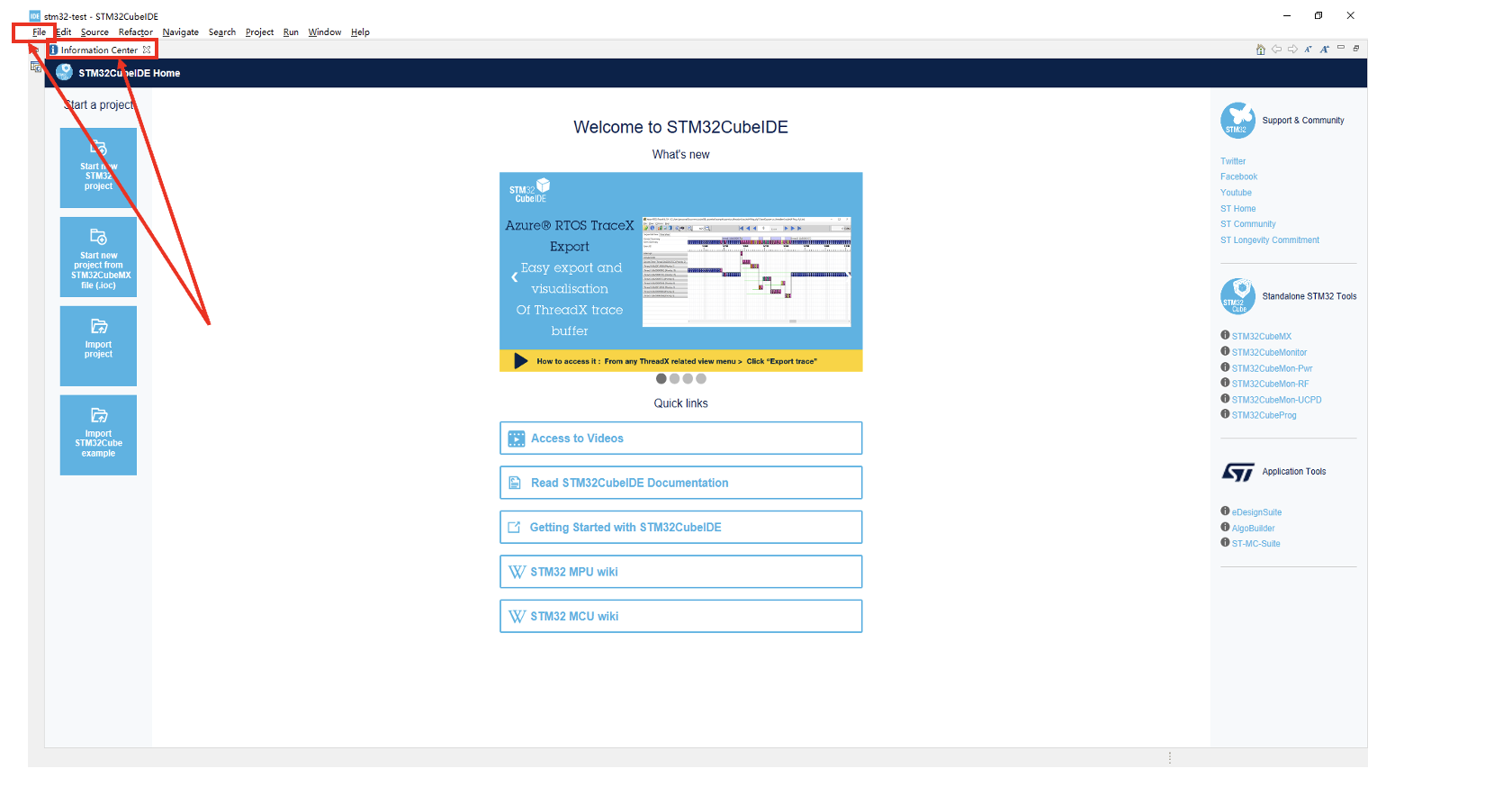
3、到达Import页面
关闭首页Information Center,选择 File -> Import,此时会弹出Import页面,如下图所示:
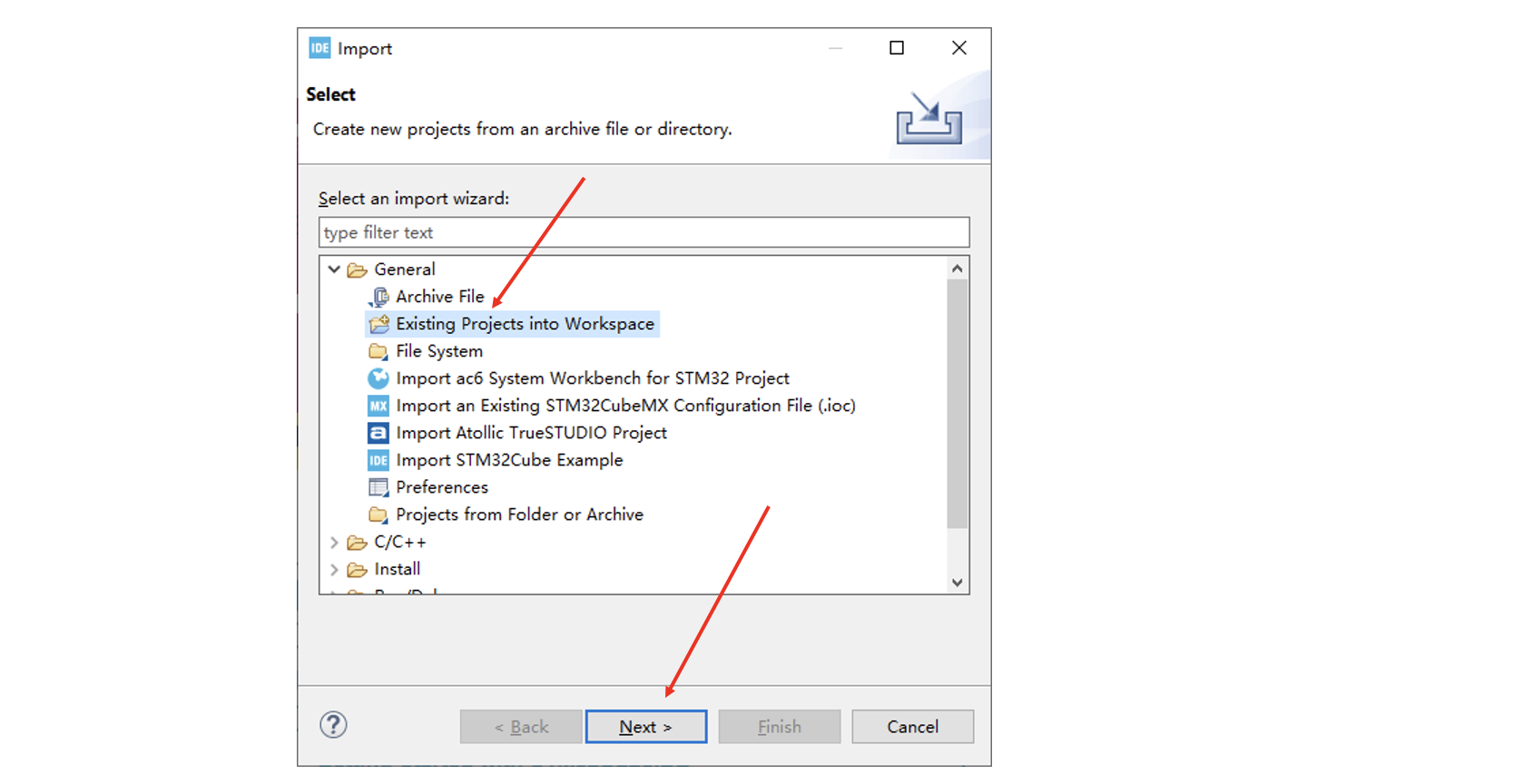
4、开始导入工程
在Import页面中选择Existing Projects into Workspace, 然后点击Next。 如下图所示:
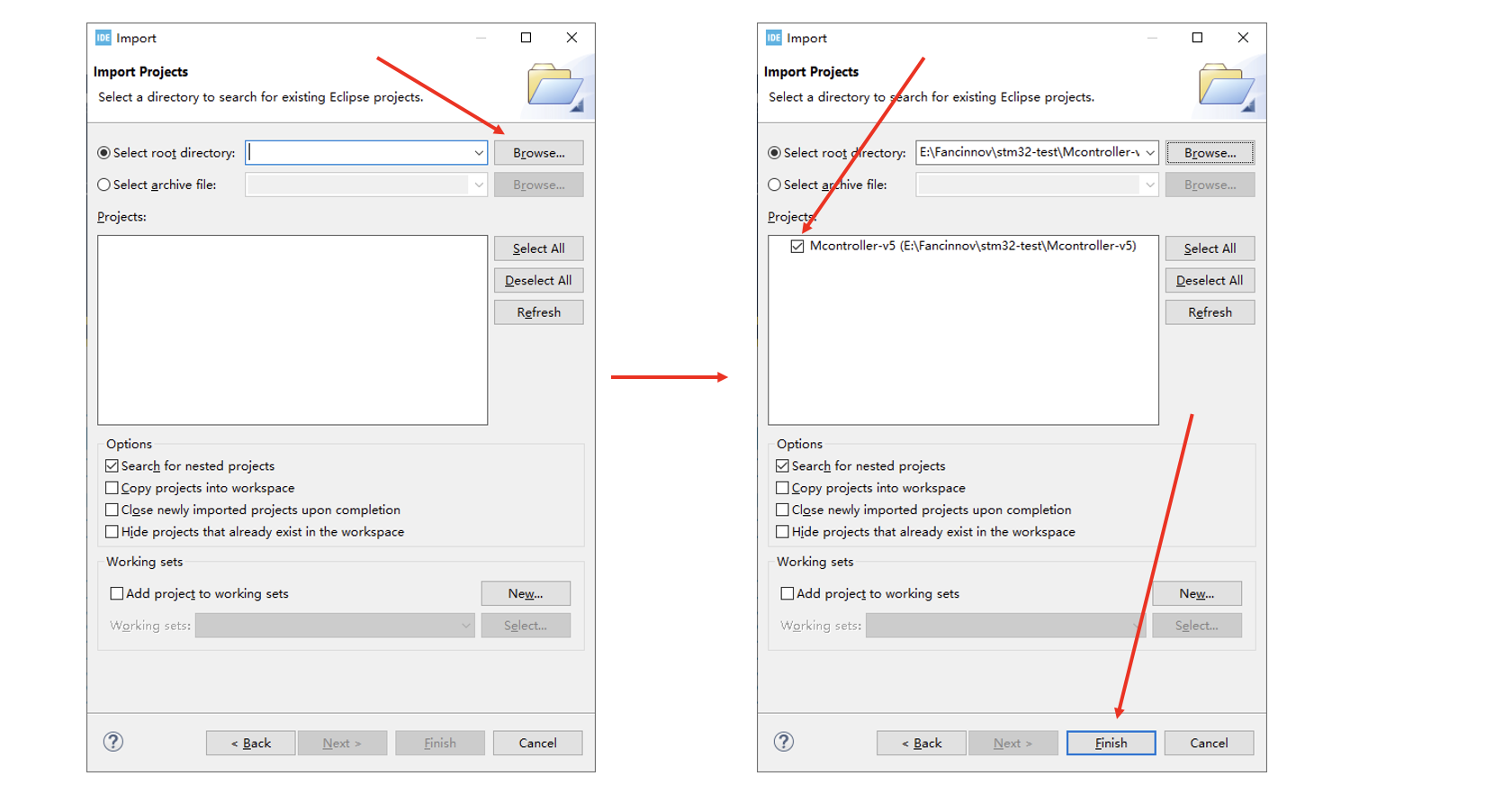
5、选择要导入的工程文件
点击Browse,选择刚刚添加到工作空间中的工程文件夹。勾选要导入的工程,并点击Finish。 如下图所示:
6、设置依赖项
右键点击工程名,选择Properties弹出属性选项卡,让工程能够找到Mcontroller-v7-FanciSwarm 依赖包libMcontroller-v7-FanciSwarm.a。 如下图所示:

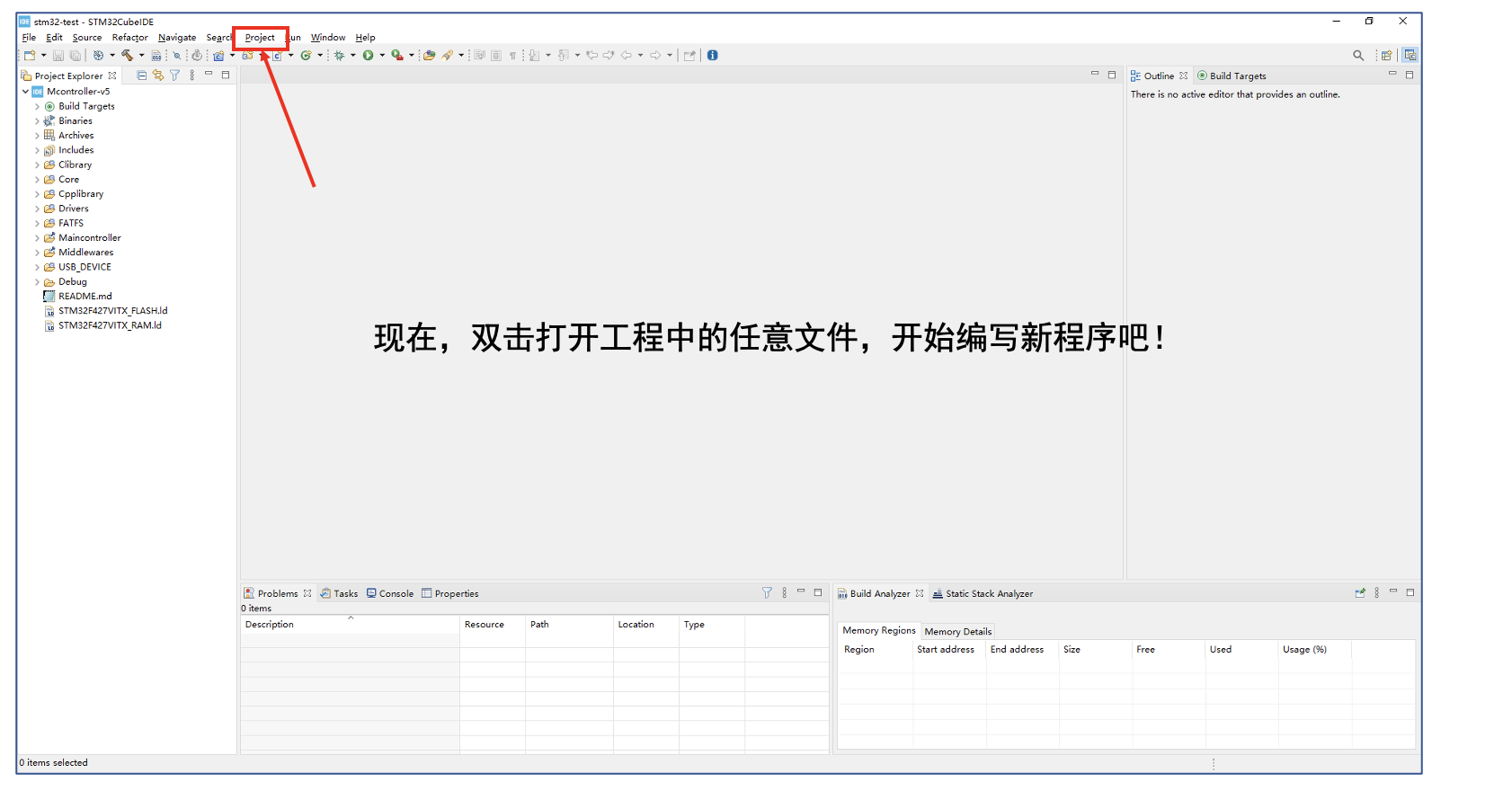
7、导入完成
此时已经完成了工程导入,点击 Project -> Build All 即可编译工程生成.hex文件(固件)。 如下图所示:
特别说明:编译报错处理办法
若编译时出现如下报错,报错路径:…/plugins/…gnu-tools…,表示交叉编译工具链不兼容。
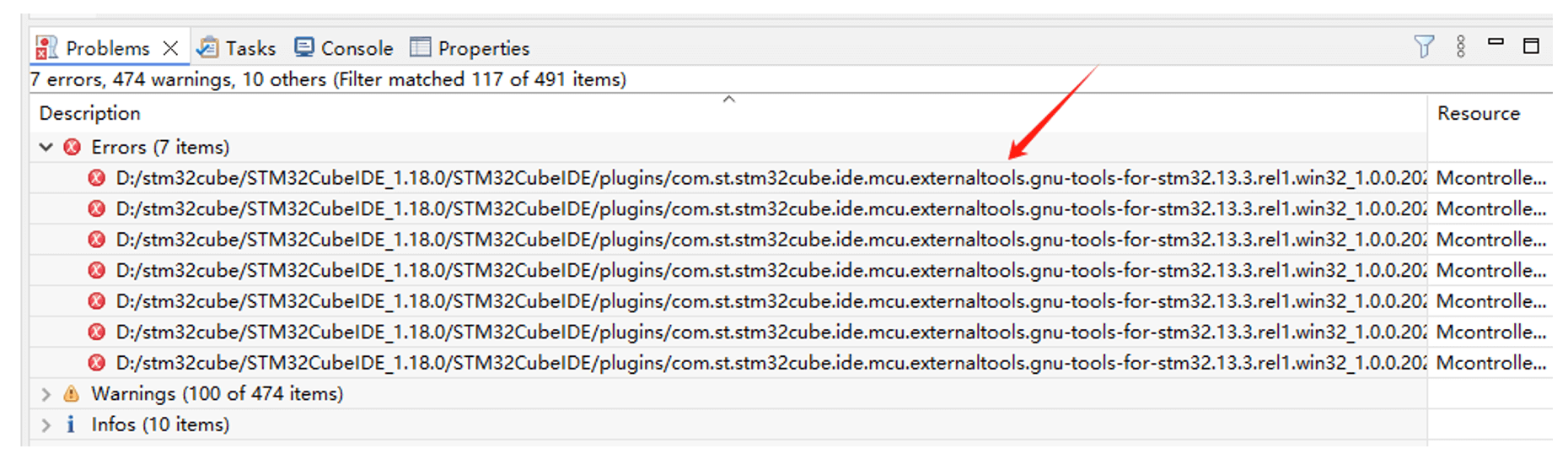
请点击下方按钮查看详细解决方案。
点击查看
高级开发指南——程序烧录指南
注:请先参阅上一章节“工程开发指南”,完成.hex文件(固件)的编译生成后,再按以下步骤进行烧录。
使用STM32CubeProgrammer(请务必使用 V2.15 版本,其他版本可能存在兼容性问题,导致无法正常使用)(点击下载,提取码:mnmy)对FanciSwarm™ 进行程序烧录,烧录步骤分为以下5步。
1、选择下载方式
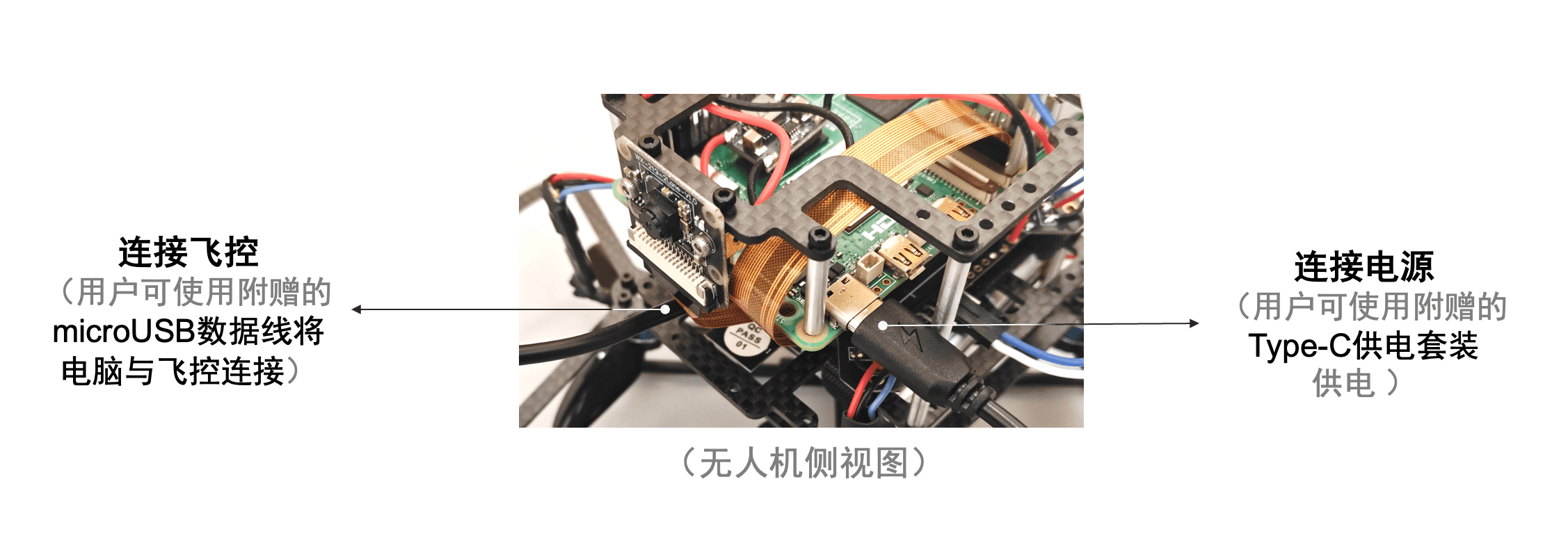
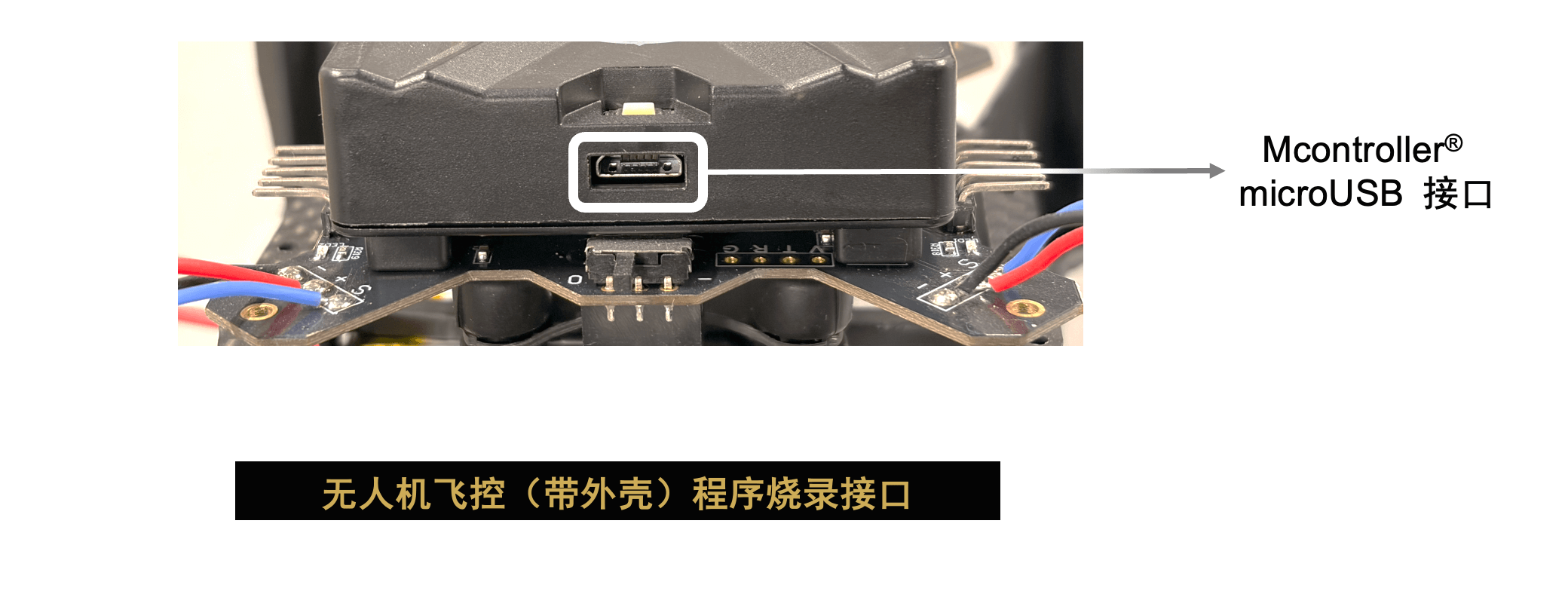
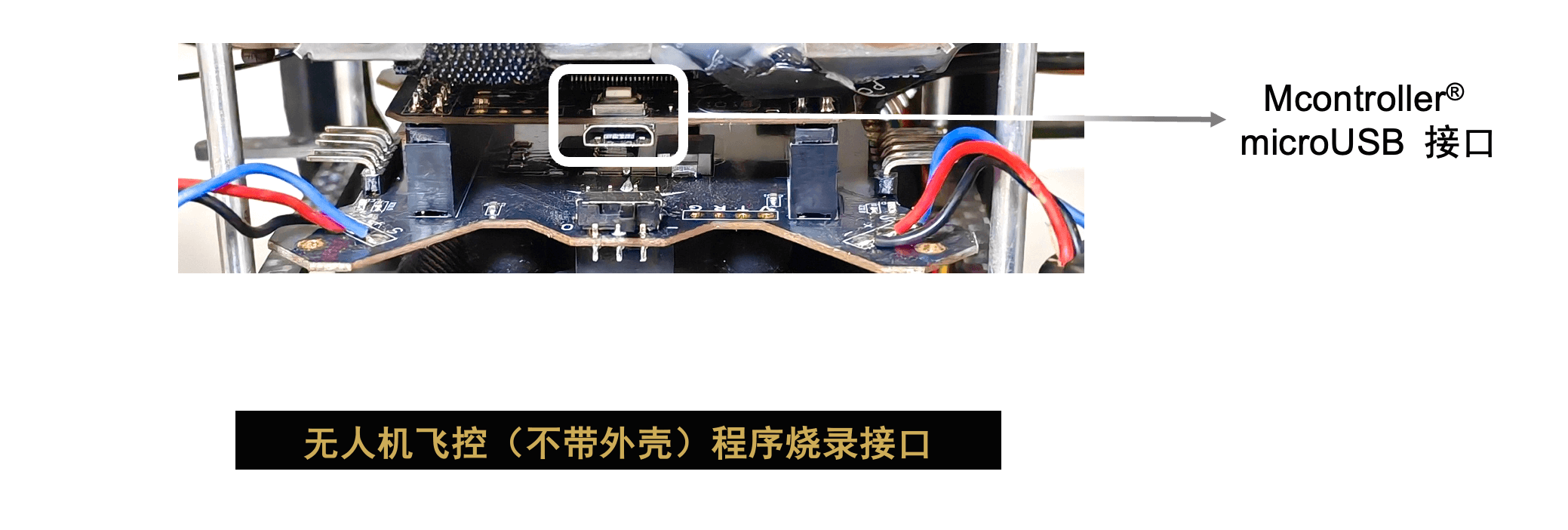
使用附赠的 USB 线,将一端连接至 Mcontroller® 跨模态飞控的 microUSB 接口(接口位置见下图):
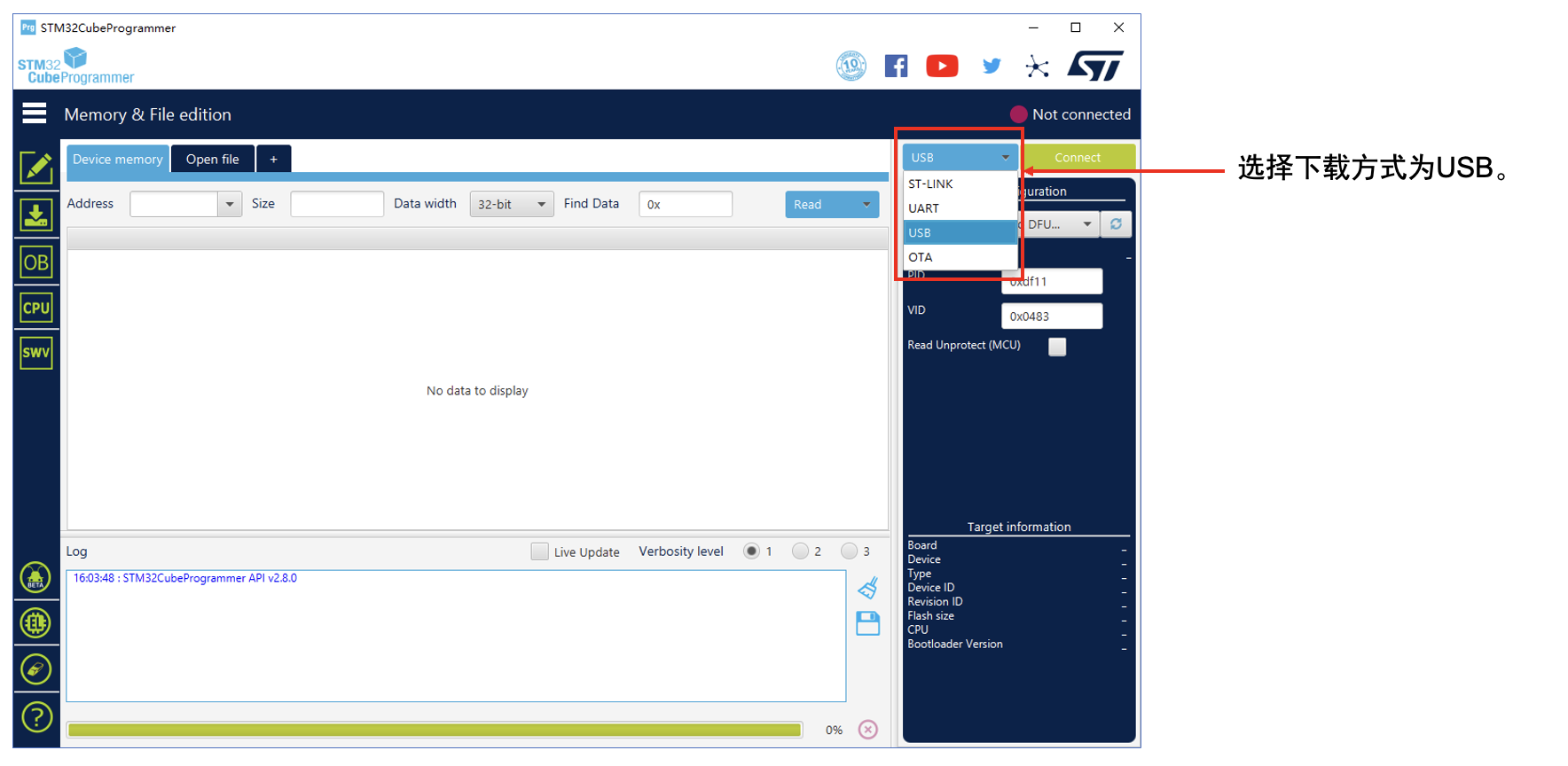
另一端连接电脑。打开 STM32CubeProgrammer,在下载方式中选择 USB,如下图所示:
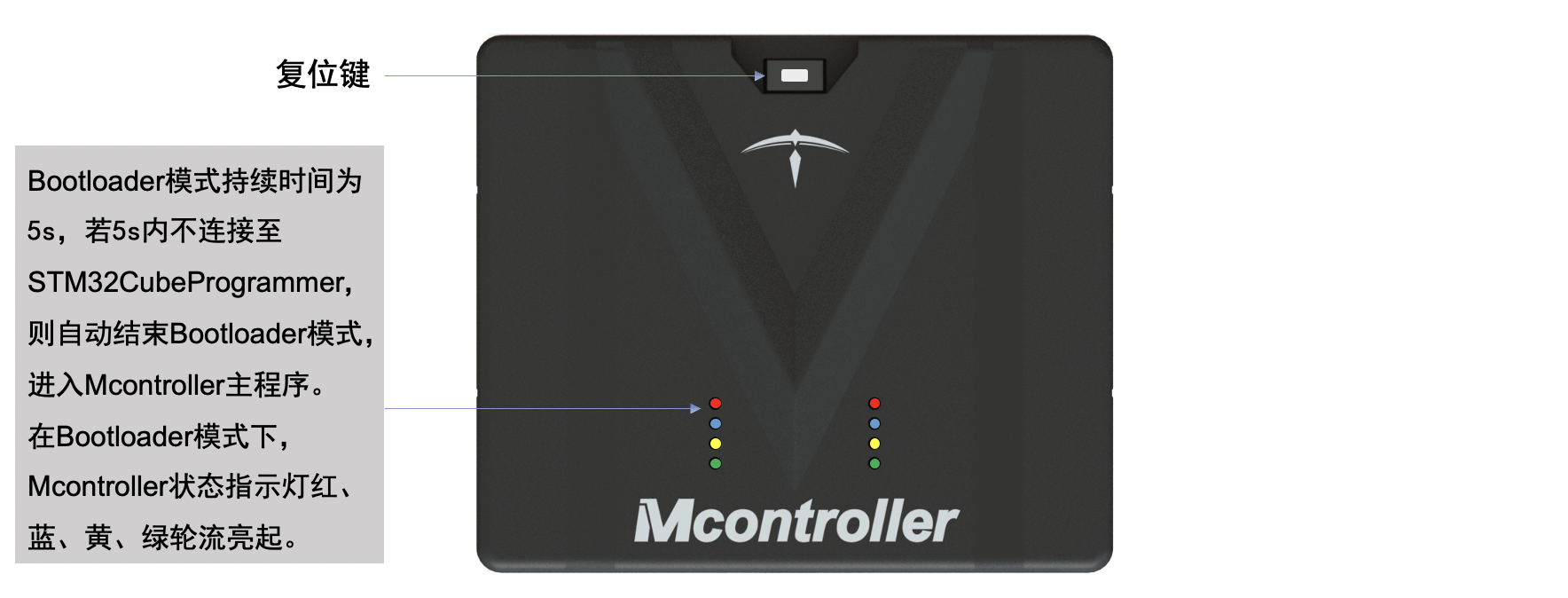
2、Mcontroller® 进入Bootloader模式
重新拔插Mcontroller® 的USB线,或点击Mcontroller® 复位键,使其进入Bootloader模式,如下图所示:
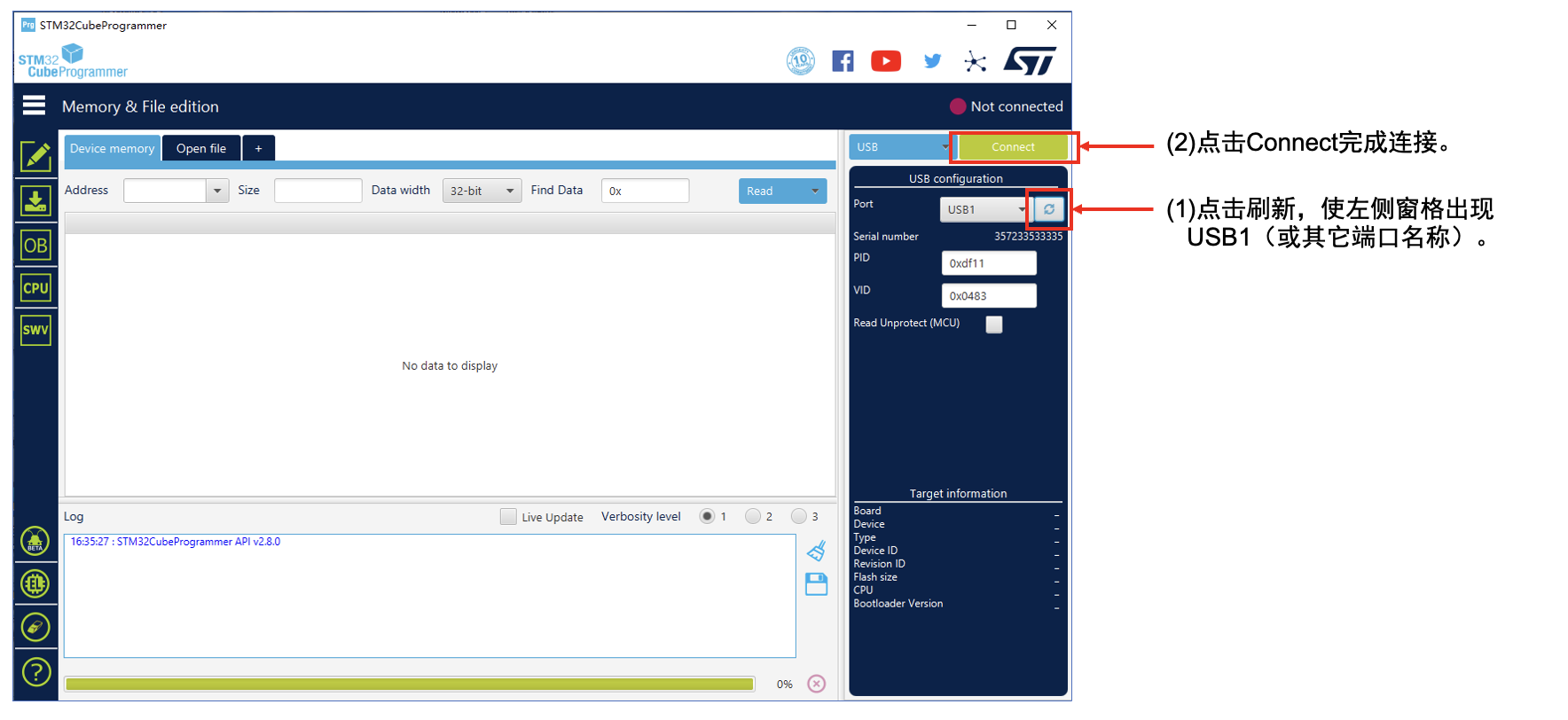
3、连接STM32CubeProgrammer
在Bootloader模式下连接STM32CubeProgrammer,如下图所示:
4、选择固件并下载
其中,固件为上一章节《工程开发指南》中编译生成的 .hex 文件,或由幻思创新工程师单独提供的 .hex 固件文件。
进入下载选项卡,选择固件文件,并开始下载,如下图所示:

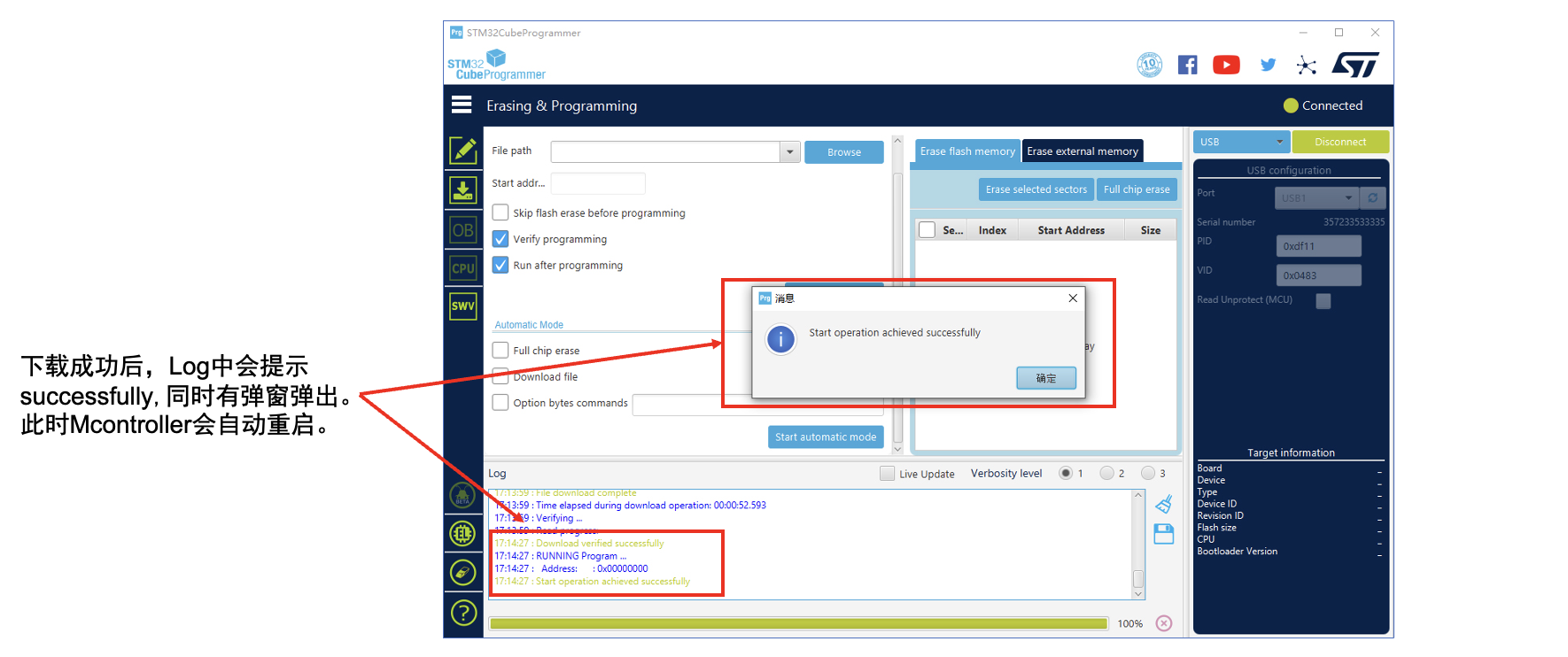
5、下载成功
下载成功后,Mcontroller® 会自动重启。此时,STM32CubeProgrammer界面会出现相关提示, 如下图所示:
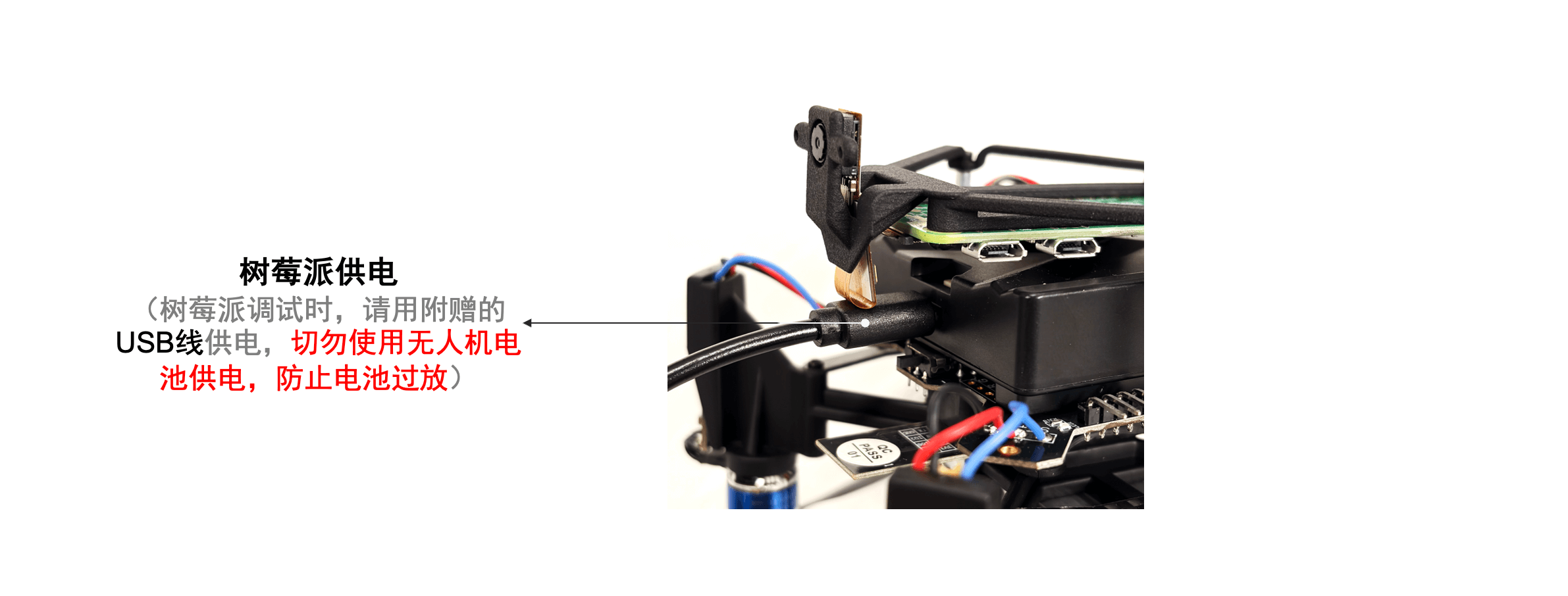
高级开发指南——飞控供电指南
注:在进行无人机静态调试时,请使用附赠的 USB 线为飞控供电。将 USB 线一端连接至 Mcontroller® 跨模态飞控的 microUSB 接口(接口位置见下图),另一端连接至电脑或者充电宝等外部电源。 请勿使用无人机电池供电,以避免电池过放。
高级开发指南——系统常用配置说明
常用配置的宏定义参数位于Clibrary/include/config.h文件中。其中部分参数是只读的,用户不可以修改,另一部分是用户可以自由配置的。
• 只读参数
所有未在注释中提示可以修改的参数均为只读参数,如下图所示:

• 可配置参数
可配置的参数如下所示,注释中提示了可以修改的参数值。

• 串口通信配置
每个串口有以下5种模式:自定义模式(1)、Mavlink模式(2)、GPS模式(3)、激光测距仪模式(4)、光流模式(5);
USB口有以下3种模式:可配置模式(0)、自定义模式(1)、Mavlink模式(2)。
可配置模式(0)
特别注意,仅COMM_0可以配置为CONFIG_COMM模式。在可配置模式下,用户可以通过USB端口对机载Wi-Fi模块进行配置。
轨迹飞行和集群飞行中配置组网模块(机载Wi-Fi模块)将会用到该模式。
自定义模式(1)
在自定义模式下,系统不对串口/USB收发做任何处理,用户可以通过串口自由收发数据。
Mavlink模式(2)
在Mavlink模式下,系统自动通过串口发送Mavlink心跳包(频率1hz),并查询是否有Mavlink消息包的接收,一旦接收到Mavlink消息包就自动进行消息包的解析。
GPS模式(3)
在GPS模式下,系统在启动后自动通过串口检查GPS接收机的连接状态,如果连接成功,则自动更新GPS定位数据。
激光测距仪模式(4)
在Tfmini激光测距仪模式下,系统自动检测Tfmini激光测距仪的连接状态,如果连接 成功,则自动获取Tfmini激光测距仪测距数据。
光流模式(5)
在光流模式下,系统自动检测光流连接状态,如果连接成功则自动刷新光流数据。
通过修改Clibrary/include/config.h内的COMM_0~COMM_4宏定义即可完成对应端口的模式配置,如下图所示:

高级开发指南——线程创建
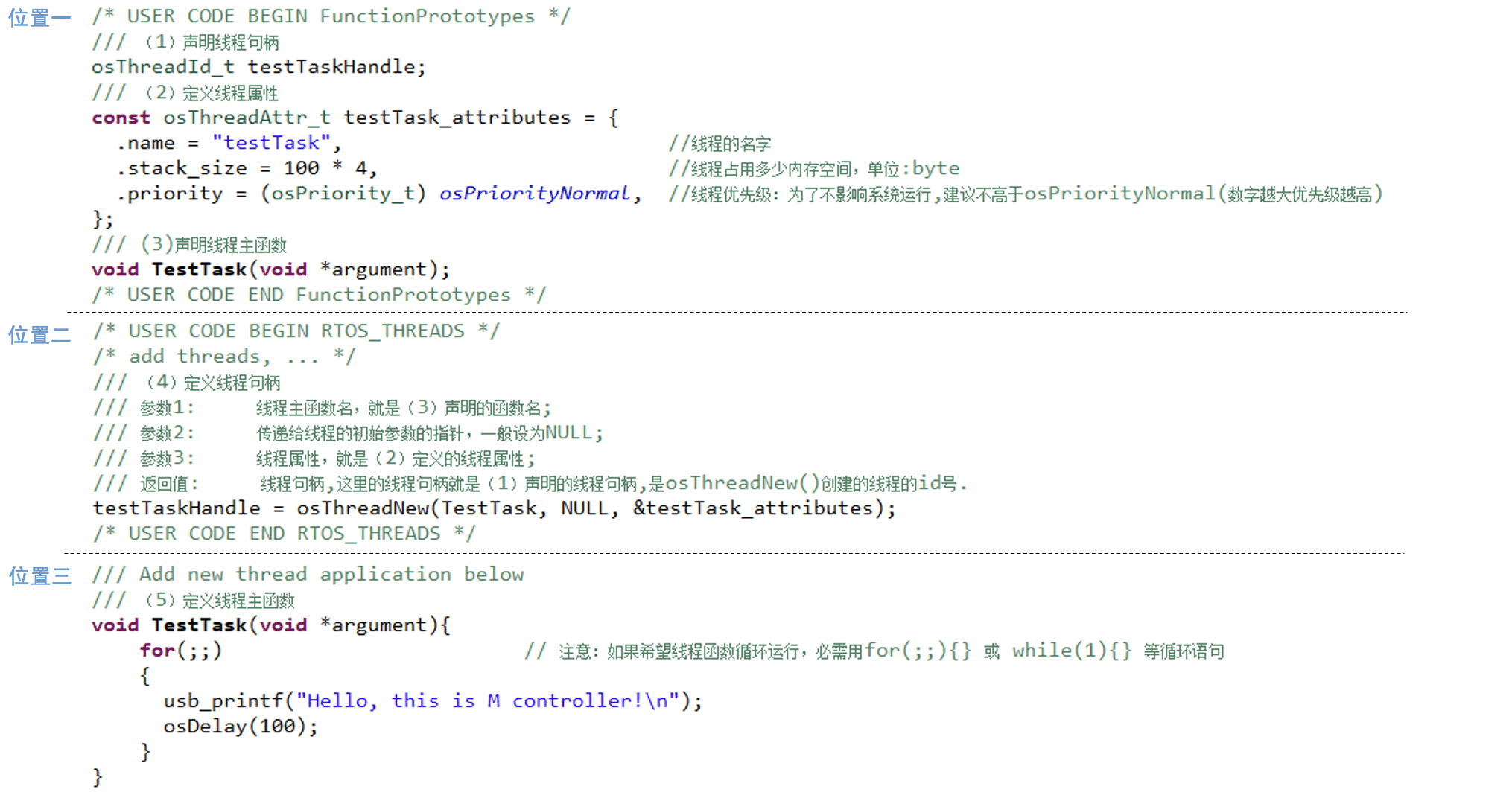
• 建立线程
基于Mcontroller,建立新线程需要5步,可以参考/Core/Src/freertos.c文件中的例程,注意这5步分散在文件的三个位置。如下图所示:
• 查询线程内存
1、查询线程内存的必要性
线程内存包括两部分,(1)为单线程分配的栈空间; (2)所有线程共用的堆空间。
如果内存分配过大会造成资源浪费,分配过小会导致内存泄漏、程序崩溃。一般分配内存的方式是首先分配一个较大的内存,然后在程序运行时查询内存使用情况,再把内存调整到一个合理大小。
2、查询函数
查询栈空间剩余情况:vTaskGetInfo(); 查询堆空间剩余情况:xPortGetFreeHeapSize()。
3、例程
可参考/Core/Src/freertos.c文件中的例程代码。如下图所示:

• 线程的定时调度
在工程中,常常需要让线程每隔一段时间运行一次,这就是定时调度。Mcontroller支持以下三种定时调度方式,例程可以参考工程的/Core/Src/freertos.c文件中的线程主函数。
1、相对延时
osDelay(),单位:ms。在当前时刻延时设定的毫秒后,再运行。
2、绝对延时
vTaskDelayUntil(),单位:ms。每隔设定的毫秒自动运行一次。
3、系统定时
Mcontroller有四个系统定时器分别为400hz,200hz,100hz和50hz,对应于四个线程Loop400hzTask()、Loop200hzTask()、Loop100hzTask()和Loop50hzTask()。实际使用时,把需要周期运行的函数添加到这四个线程中即可。
高级开发指南——程序调试
• printf()调试
printf()函数在c语言中比较常见,经常用来在电脑上输出一些变量数值用于调试代码bug,但是嵌入式系统没有显示器,无法直接用printf()打印测试数据。为此,我们为Mcontroller开发了两种调试方式,通过将Mcontroller与电脑usb口连接,在电脑的串口调试助手上打印出调试信息。
• printf输出方式
Mcontroller支持两种printf输出方式:(1)USB口; (2)串口。函数在Clibrary/include/hal.h中,用户可以直接调用。每一种printf输出方式又分为printf()和printf_dir(),我们推荐使用printf()。如下图所示:
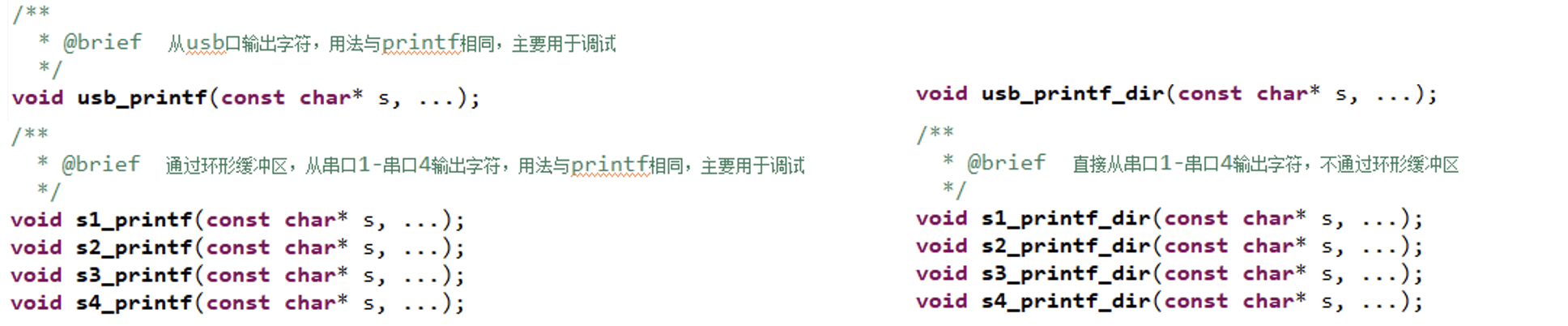
• printf()/printf_dir()
printf()的方式是先把数据发送给缓冲区,再从缓冲区集中传递给底层硬件;printf_dir()是不通过缓冲区直接传递给底层硬件。这两种方式都可以发送大型数据而不会引起线程堵塞,但是通过缓冲区的方式可以连续调用,而不通过缓冲区的方式不能连续调用,它的两次调用之间需要间隔几毫秒。因此,我们推荐使用printf()。
高级开发指南——上层应用函数库的使用
• 低通滤波器的使用
滤波器的头文件为LowPassFilter.h以及LowPassFilter2p.h。demo文件为Maincontroller/demo/demo_filter.cpp。
1、定义滤波器对象
这里以float类型进行说明,如下图所示。用户可以根据不同需求自主选择int类型,long类型,Vector2f或者Vector3f类型。

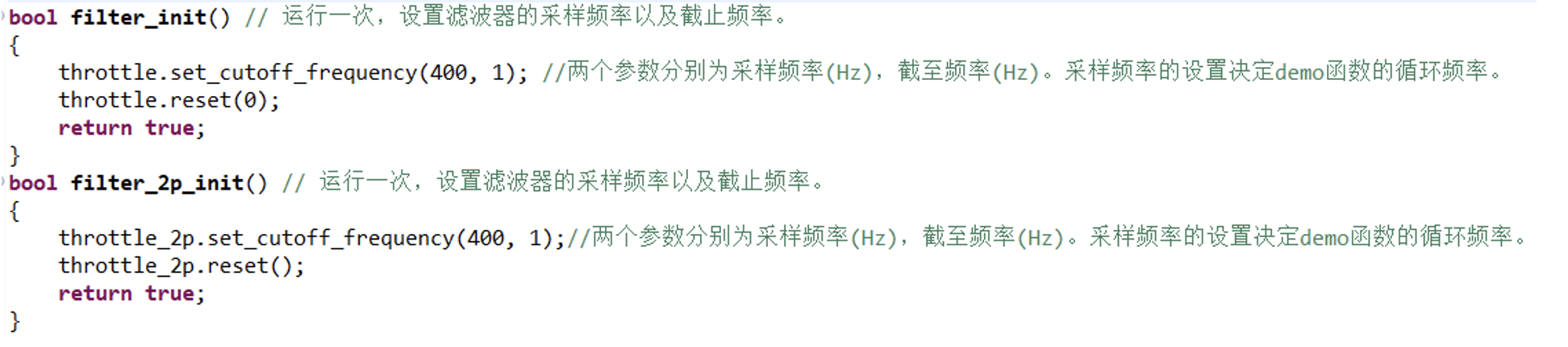
2、初始化
在初始化函数中,调用set_cutoff_frequency(float sample_freq, float cutoff_freq)函数,用以设置滤波器的采样频率(Hz)以及截止频率(Hz),初始化函数只运行一次。其中采样频率的设置,决定后续demo函数的循环运行频率。如下图所示:
3、调用demo函数
下图是demo函数,通过调用apply()函数,实现滤波。具体操作为:输入采样值,得到滤波后的输出值。该demo函数需要循环运行,且循环频率与init函数中设置的采样频率一致。即需要在freertos.c中,在对应的循环频率函数下调用该demo函数即可。

• EKF库的使用
关于EKF(拓展卡尔曼滤波)的函数等主要位于Cpplibrary/include/ekf文件夹中,包括ekf_baro.h,ekf_gnss.h,ekf_odometry.h,ekf_rangefinder.h。用户可以根据不同需求自主选择对应头文件内的函数使用。
1、定义ekf对象
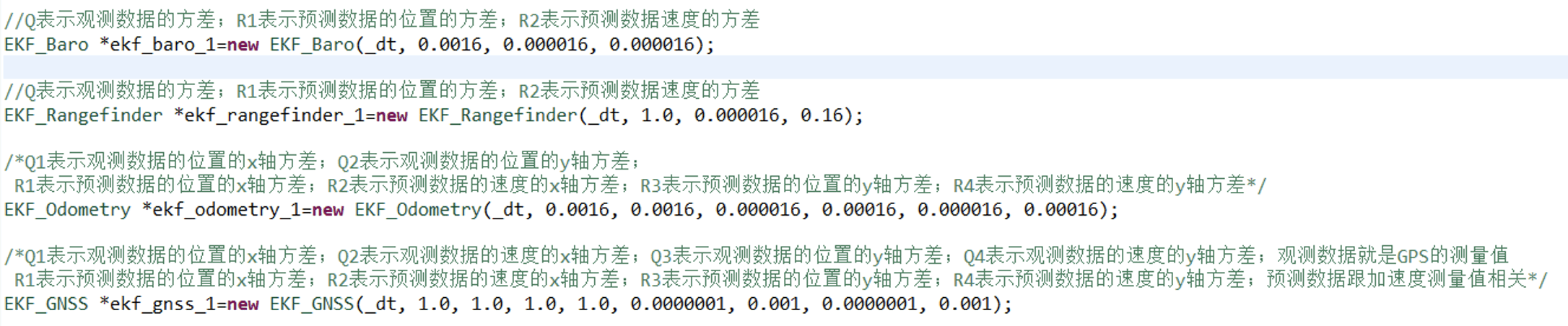
定义EKF_Baro对象,_dt表示运行周期,一般取0.0025;Q表示观测数据的方差;R1表示预测数据的位置的方差;R2表示预测数据速度的方差。
定义EKF_Rangefinder对象,_dt表示运行周期,一般取0.0025;Q表示观测数据的方差;R1表示预测数据的位置的方差;R2表示预测数据速度的方差。
定义EKF_Odometry对象,_dt表示运行周期,一般取0.0025;Q1表示观测数据的位置的x轴方差;Q2表示观测数据的位置的y轴方差;R1表示预测数据的位置的x轴方差;R2表示预测数据的速度的x轴方差;R3表示预测数据的位置的y轴方差;R4表示预测数据的速度的y轴方差。
定义EKF_GNSS对象,_dt表示运行周期,一般取0.0025;Q1表示观测数据的位置的x轴方差;Q2表示观测数据的速度的x轴方差;Q3表示观测数据的位置的y轴方差;Q4表示观测数据的速度的y轴方差,观测数据就是GPS的测量值。R1表示预测数据的位置的x轴方差;R2表示预测数据的速度的x轴方差;R3表示预测数据的位置的y轴方差;R4表示预测数据的速度的y轴方差,预测数据跟加速度测量值相关。更小的Q表示更相信GPS,更小的R表示更相信imu。
上述ekf对象的定义,如下图所示:
2、参数调整策略
可以从demo给定的参数开始调整,调整的时候一般十倍十倍调整,越小的参数会导致ekf滤波结果变化比较满比较平滑,这会导致动态响应不好,表现的是滤波数据有比较大的滞后,如果出现这个问题就把这些参数调大。特别注意,Odometry只观测了位置,而GNSS既观测了位置又观测了速度,实际使用时可以根据不同需求灵活调用。
3、调用函数
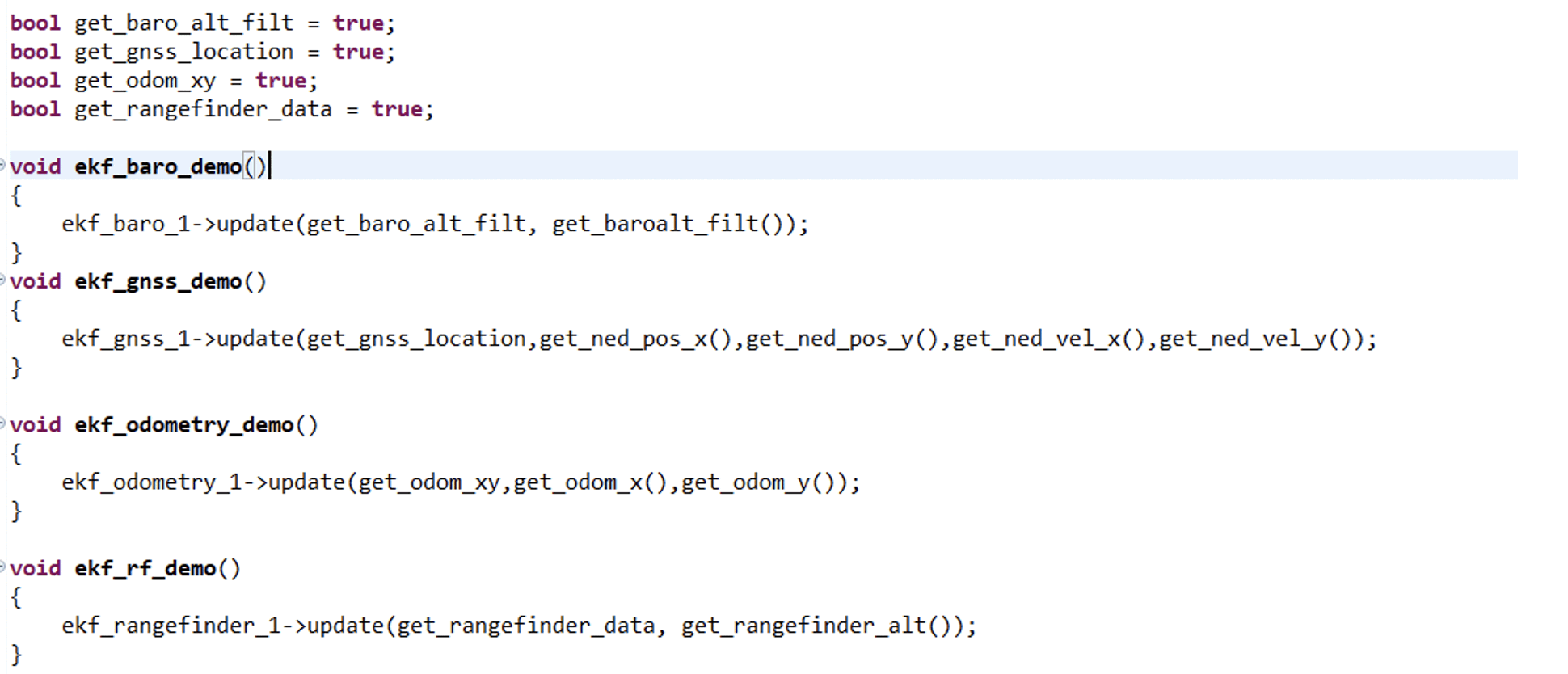
具体调用函数如下图所示,调用每个对象中的update()函数,来实时更新数据。其中,每个update()函数中的第一个参数均为bool类型,实际为一种标志位。在update()中该标志位会被置成False,但在外部更新测量值的函数中,若接收到更新后的测量值,该标志位会被重新置成True。以这种方式来判断是否收到测量值。
• PID库的使用
1、头文件
使用PID相关函数时需引用“maincontroller.h”库文件,其中包含了pid.h等与pid使用相关的头文件。如下所示:
<!-- 引用库文件 --> #include "maincontroller.h"
2、定义PID对象
定义PID对象,如下所示。其中参数分别代表PID控制中的p参数,i参数,d参数,积分结果最大值,输入error的低通滤波截止频率(Hz),以及PID运行周期(s)。
PID *pid = new PID(kp, ki, kd, imax, filt_hz, dt);

3、单环PID使用
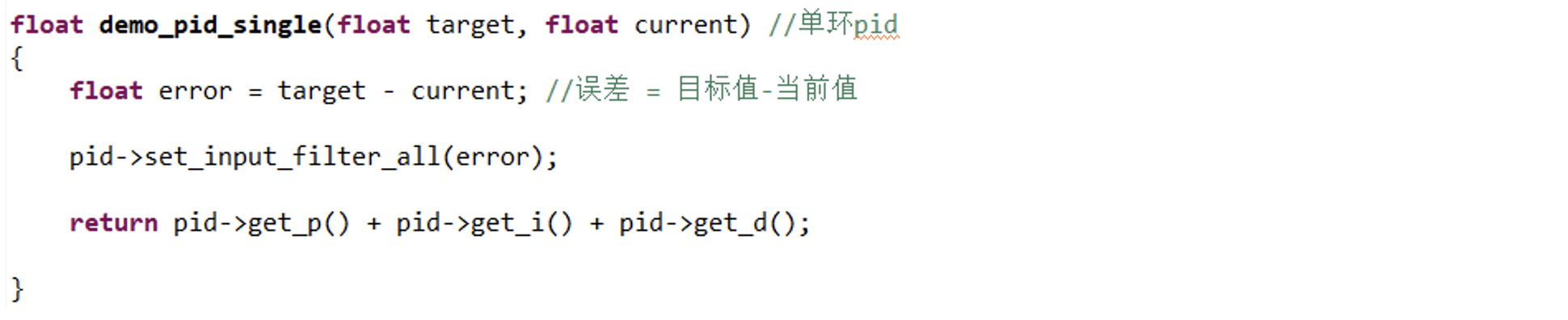
函数参数包括目标值以及当前值,目标值减去当前值得到误差值,将误差值传入set_input_filter_all()函数。该函数通过定义的pid对象来调用,返回计算得到的pid数值。可以通过定义的pid对象调用get_p(),get_i(),get_d(),来分别得到返回的计算值;也可以通过get_pid()函数一步返回计算值。如下图所示:
4、串级PID使用(三环)
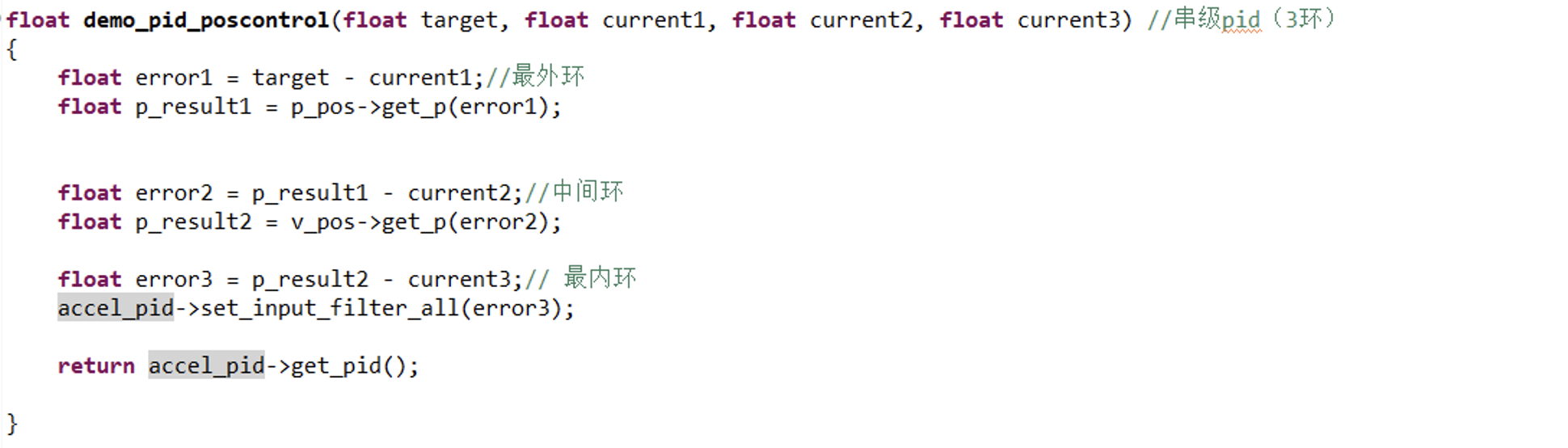
以三环串级PID为例,函数参数包括目标值,以及三个PID环的当前值。从最外环开始,目标值减去最外环当前值,得到最外环误差值;通过定义好的p类对象调用get_p()函数,并将最外环误差值传入,得到最外环输出,即中间环的目标值。重复上述过程,得到最内环的目标值。最内环的误差值传入通过pid对象调用的set_input_filter_all()函数,返回计算值get_pid(),即最终的输出。
5、二维PID使用
二维PID的使用需要定义二维PID对象,即PID_2D,如下图所示。其中参数分别代表二维PID控制中的p_x参数,p_y参数,i_x参数,i_y参数,d_x参数,d_y参数,积分结果最大值,输入error的低通滤波截止频率(Hz),微分项滤波频率(Hz),以及PID运行周期(s)。
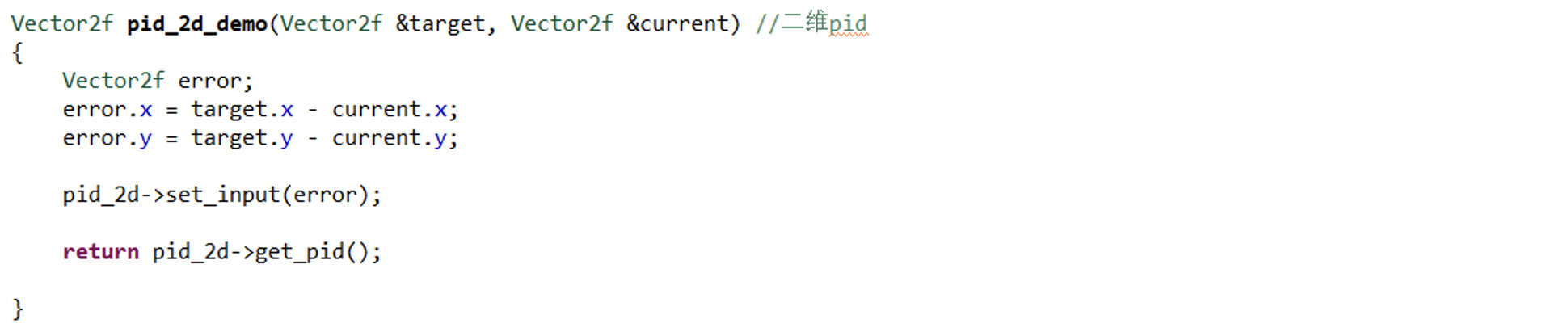
 调用demo如下图所示,由于是二维PID,需要用到Vector2f类型,代表二维向量,包含x,y两个坐标。传入目标值以及当前值之后,分别相减得到误差值,传入set_input()函数,返回get_pid()值,即可得到结果。
调用demo如下图所示,由于是二维PID,需要用到Vector2f类型,代表二维向量,包含x,y两个坐标。传入目标值以及当前值之后,分别相减得到误差值,传入set_input()函数,返回get_pid()值,即可得到结果。
高级开发指南——板载硬件资源的使用
• LED灯
板载LED灯共8个,其中可控的有7个,分别为Led1~Led7,如下图所示:

在默认状态下,所有的LED灯由系统控制,无需用户自定义。如果用户希望自定义Led灯的闪烁,可以在Clibrary/include/config.h中更改宏定义如下:
<!-- 配置LED --> #define FMU_LED_CONTROLL_ENABLE 0
此时所有LED灯不再受系统控制,用户可以调用Clibrary/include/hal.h中的以下函数自由控制LED闪烁。如下图所示:

• 蜂鸣器
函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:

• 串口
Mcontroller® 有4个串口,其中串口2、串口4已被Fanciswarm™ 使用;串口1(5V,Tx1,Rx1,Gnd)、串口3(5V,Tx3,Rx3,Gnd)拓展到了飞控的扩展板上,可连接其他硬件进行二次开发。
• 串口波特率配置
串口波特率配置函数位于Clibrary/include/hal.h文件中。如下图所示:

• USB&串口使用
函数在Clibrary/include/hal.h中,可以直接调用。
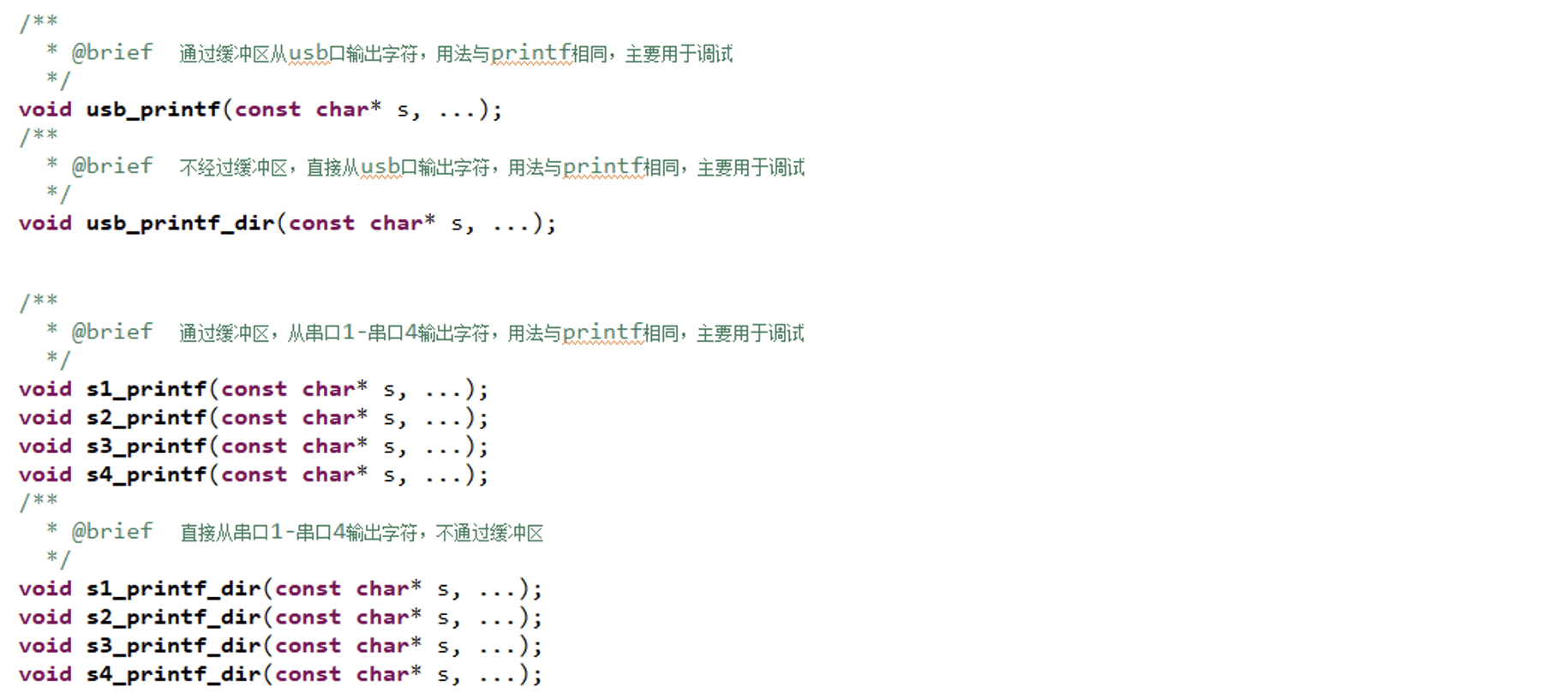
1、基于USB&串口的字符串打印函数
打印函数一般用于调试。如下图所示:
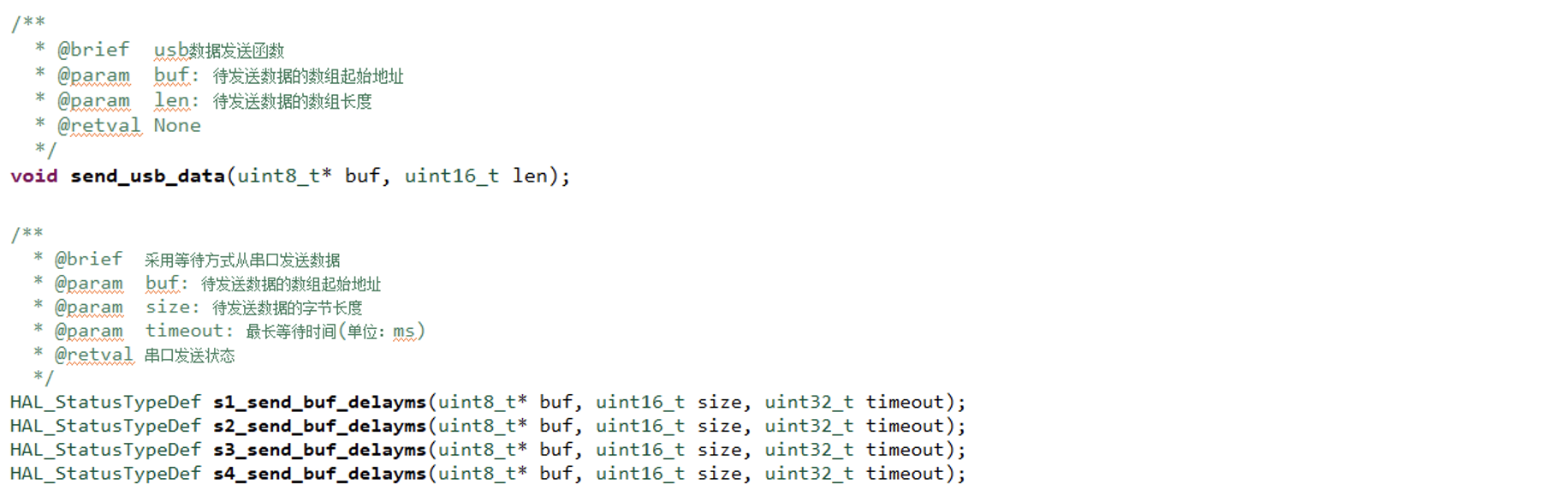
2、基于USB&串口的数据发送函数
数据发送方式分为两种,一种是实时发送方式,该发送方式的优点是立即发送、实时性强,缺点是高频调用可能丢失数据。如下图所示:
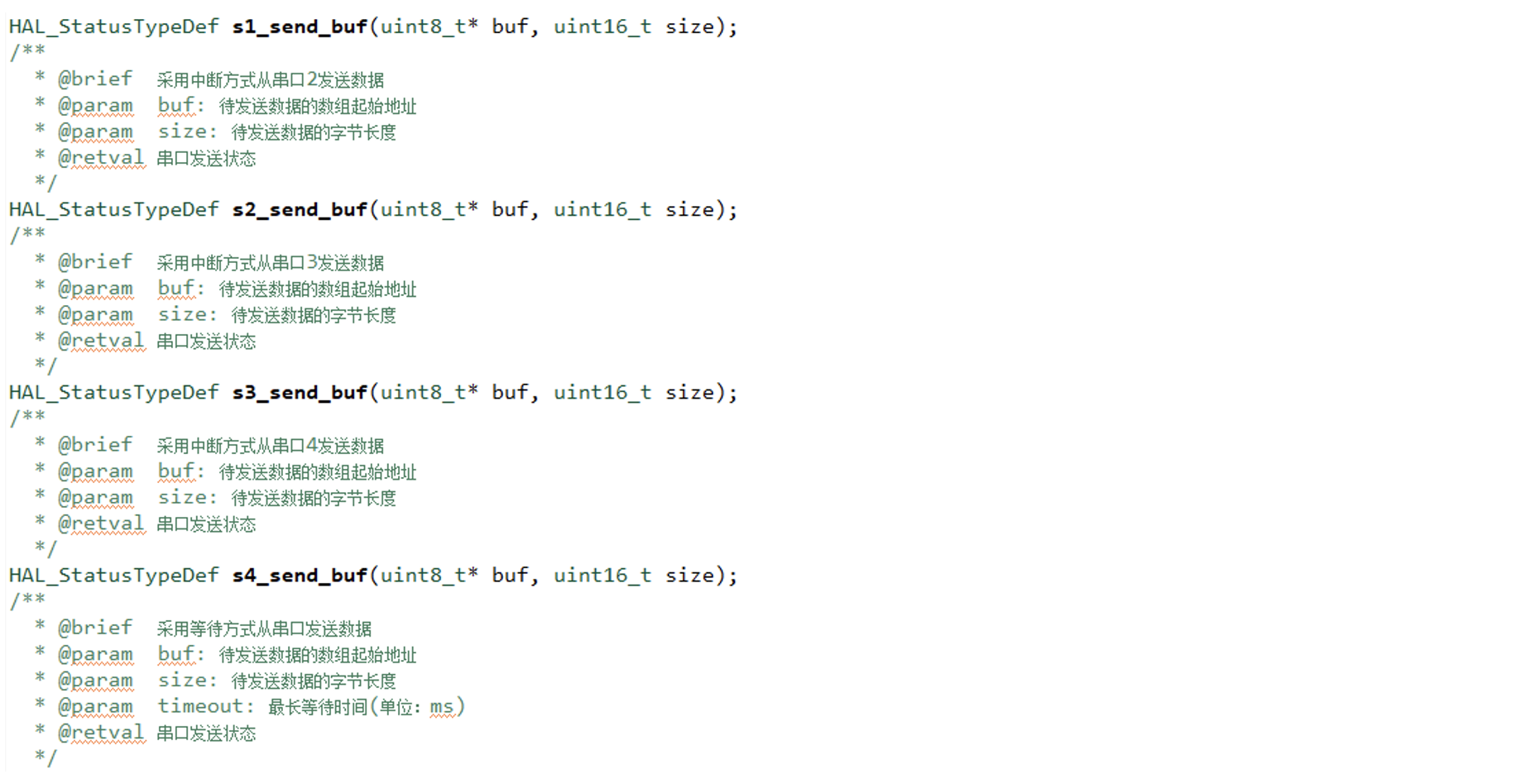
另一种是非实时发送方式,该发送方式的优点是高频调用不会丢失数据,缺点是非实时发送。如下图所示:

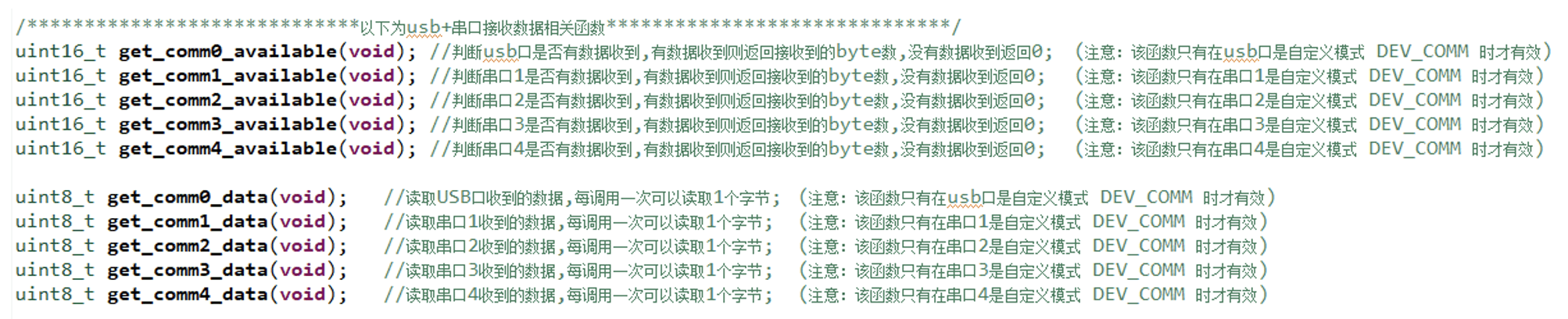
3、基于USB&串口的数据接收函数
特别注意!只有通过config_comm()函数把对应comm口配置为DEV_COMM模式才能启用下列函数。
config_comm() 函数位于/Core/Src/freertos.c中InitTask线程内。如下图所示:
• Mavlink消息包
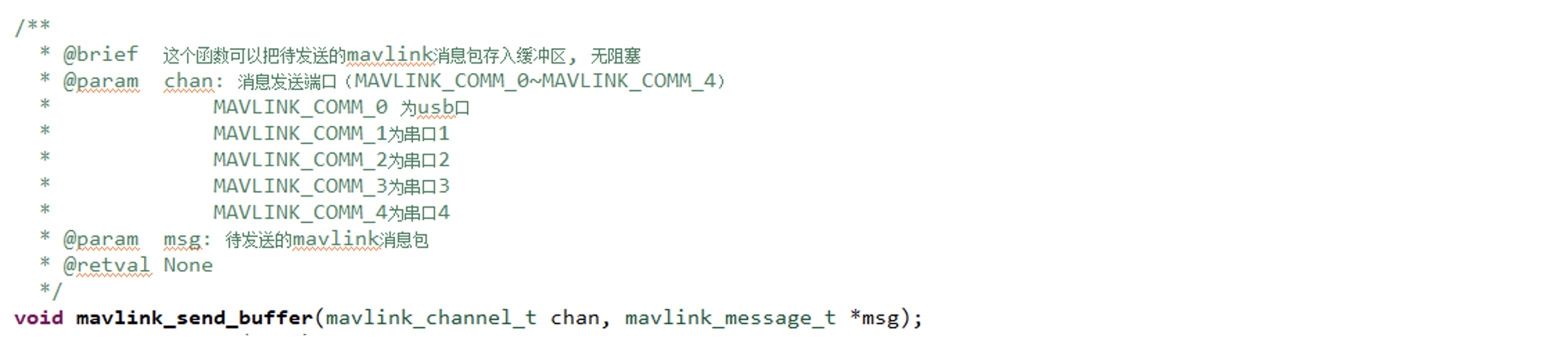
1、发送Mavlink消息包
通过串口和usb口发送Mavlink消息包,函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:
2、接收并解析Mavlink消息包
通过串口和usb口接收并解析Mavlink消息包,函数在Maincontroller/src/maincontroller.cpp中,可参考工程已有代码增加新的消息包解析代码。如下图所示:

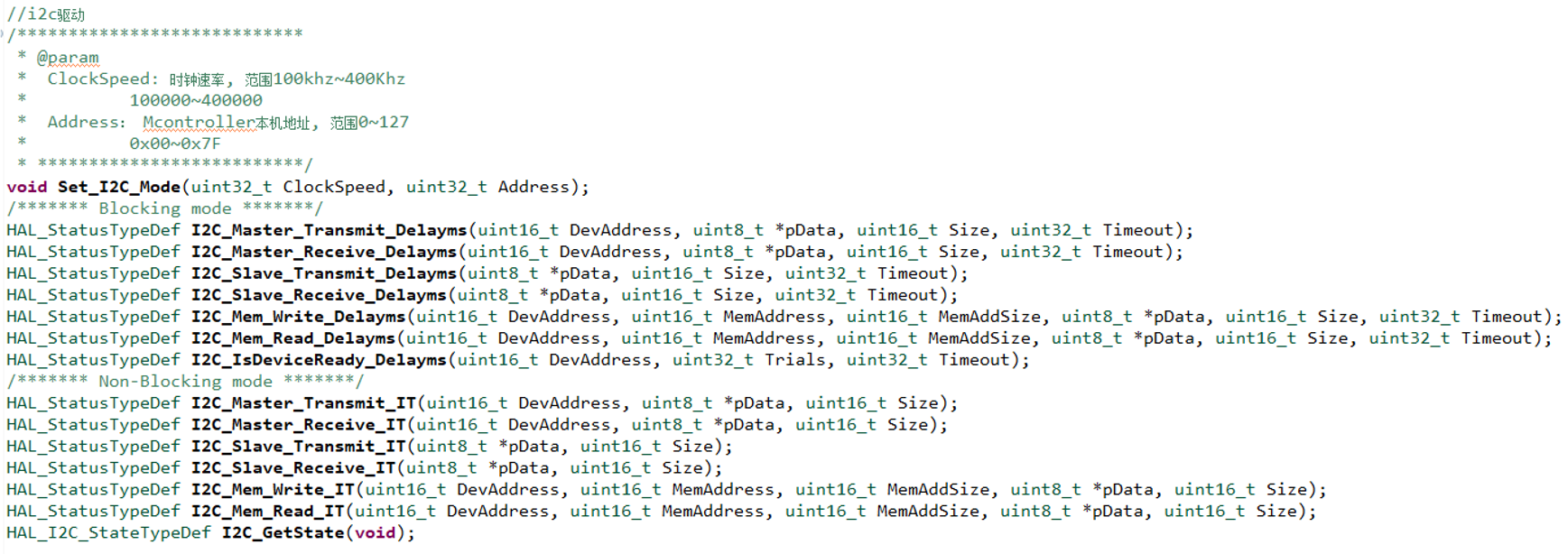
• I2C
函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:
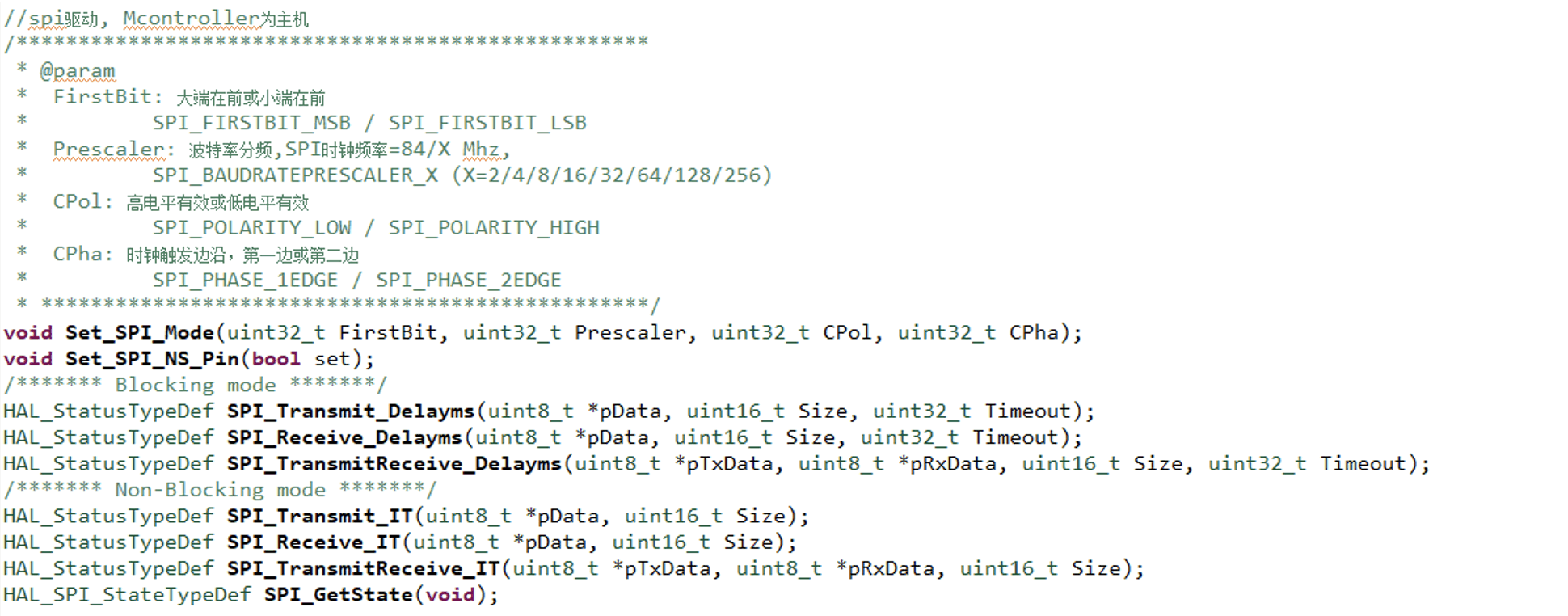
• SPI
函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:
• FRAM
1、fram驱动函数
函数在Clibrary/include/hal.h中,如下图所示。使用时无需调用该函数,而是调用它的上层函数。

2、fram上层函数
上层函数在Cpplibrary/include/flash/flash.h中,用于在板载fram中存储参数,可以直接调用,如下图所示:
3、调用demo
调用demo在Maincontroller/src/maincontroller.cpp中。所有的参数都定义在Maincontroller/inc/common.h中的parameter结构体中,用户可以参考源码添加新的参数。如下所示:
extern parameter *param
• ADC
函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:

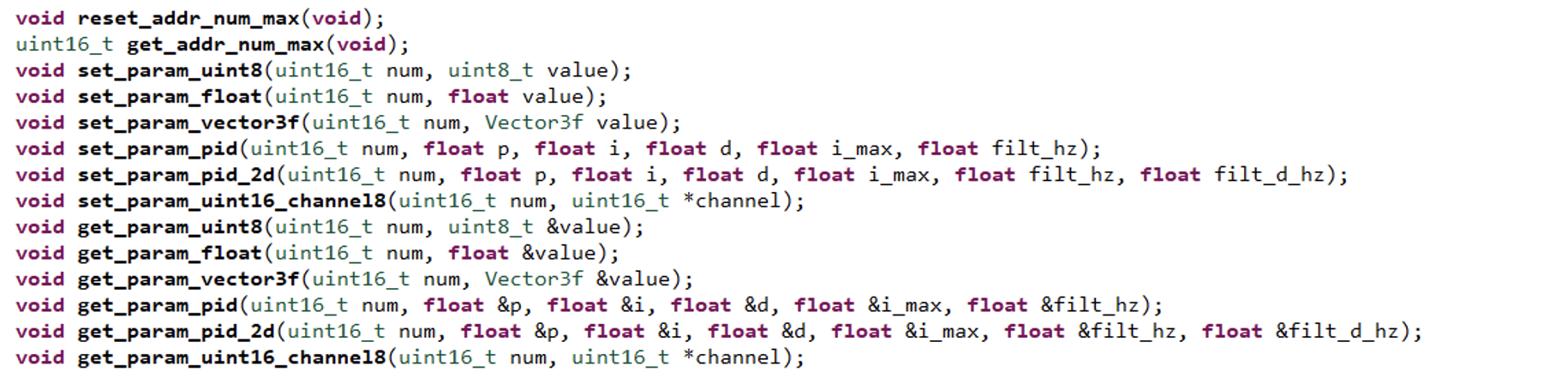
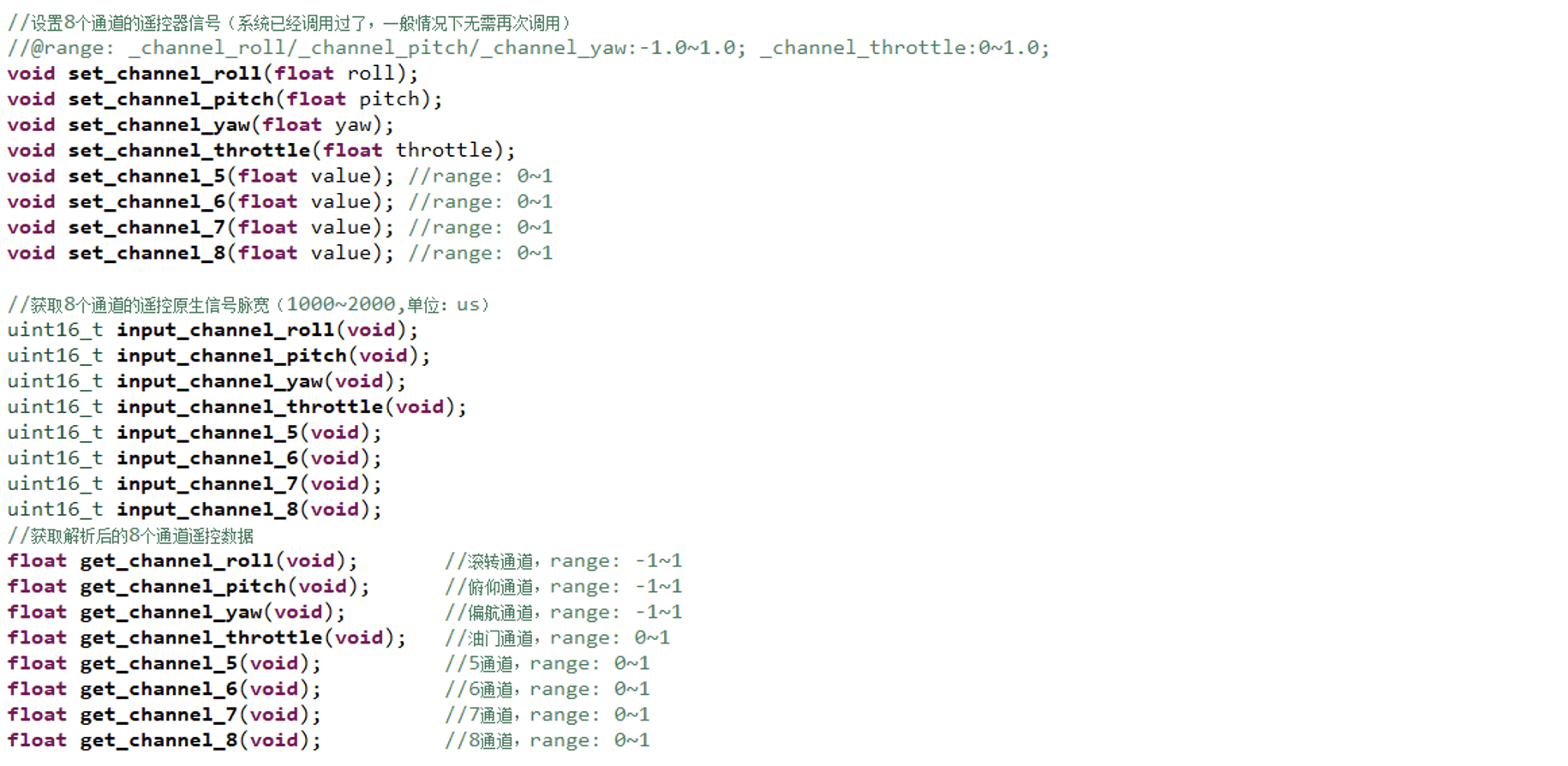
• 遥控信号
函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:
• 电机、舵机
1、电机
Mcontroller® 有8路电机信号(即PWM信号,motor1~motor8),其中motor1(M1)、motor2(M2)、motor5(M5)和motor6(M6)已被Fanciswarm™ 的四个电机使用;motor3(M3)、motor4(M4)、motor7(M7)和motor8(M8)拓展到了飞控的扩展板上,可连接其他硬件进行二次开发;
2、舵机
Mcontroller® 有4路舵机信号(即PWM信号,servo1~servo4),均拓展到了飞控的扩展板上,可连接其他硬件进行二次开发。
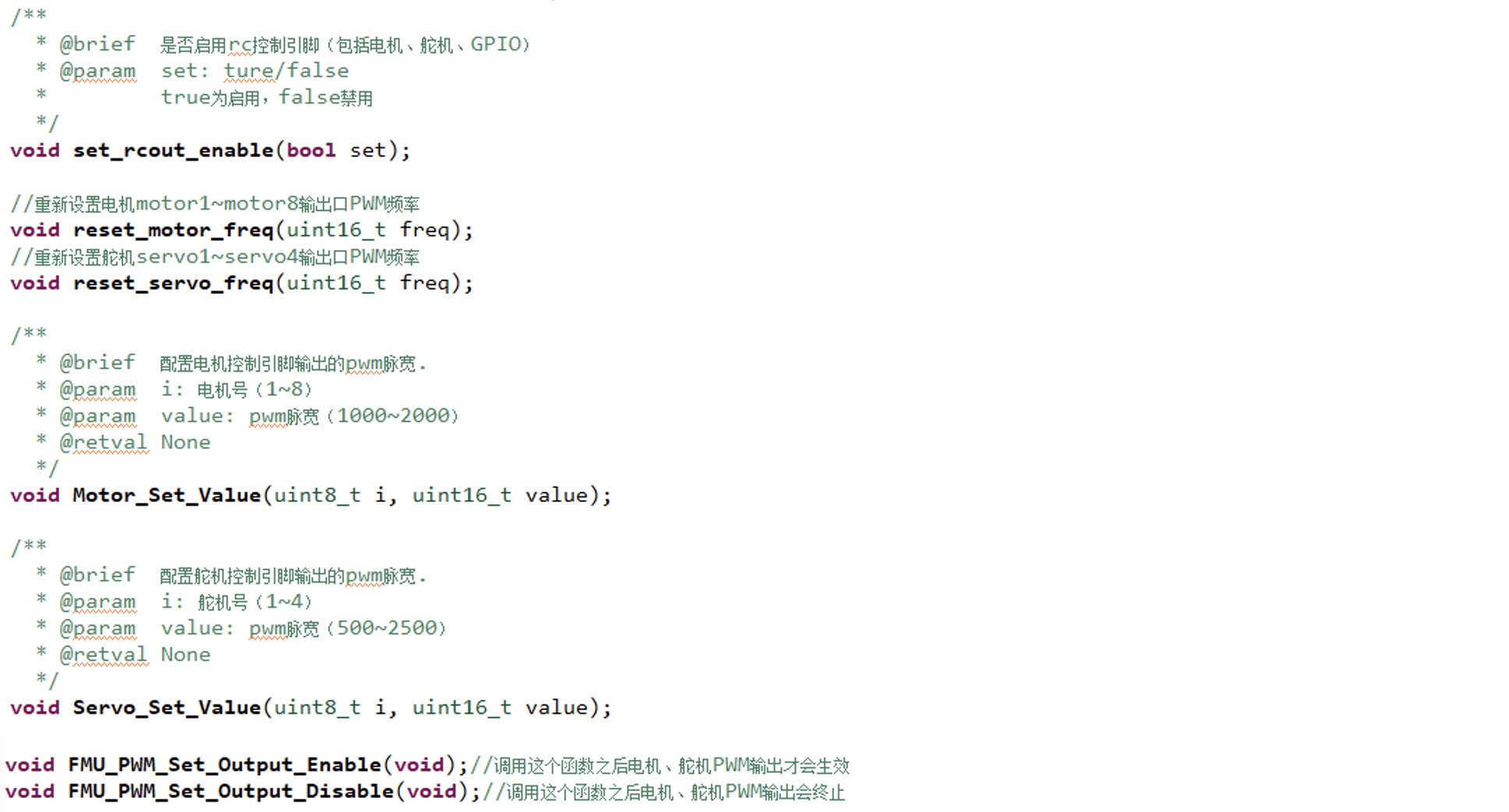
3、电机、舵机驱动函数
电机、舵机驱动函数函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:
• GPIO
Mcontroller® 有8个GPIO(gpio1~gpio8),其中gpio1(G1)、gpio3(G3)、gpio5(G5)和gpio7(G7)拓展到了飞控的扩展板上,可连接其他硬件进行二次开发。
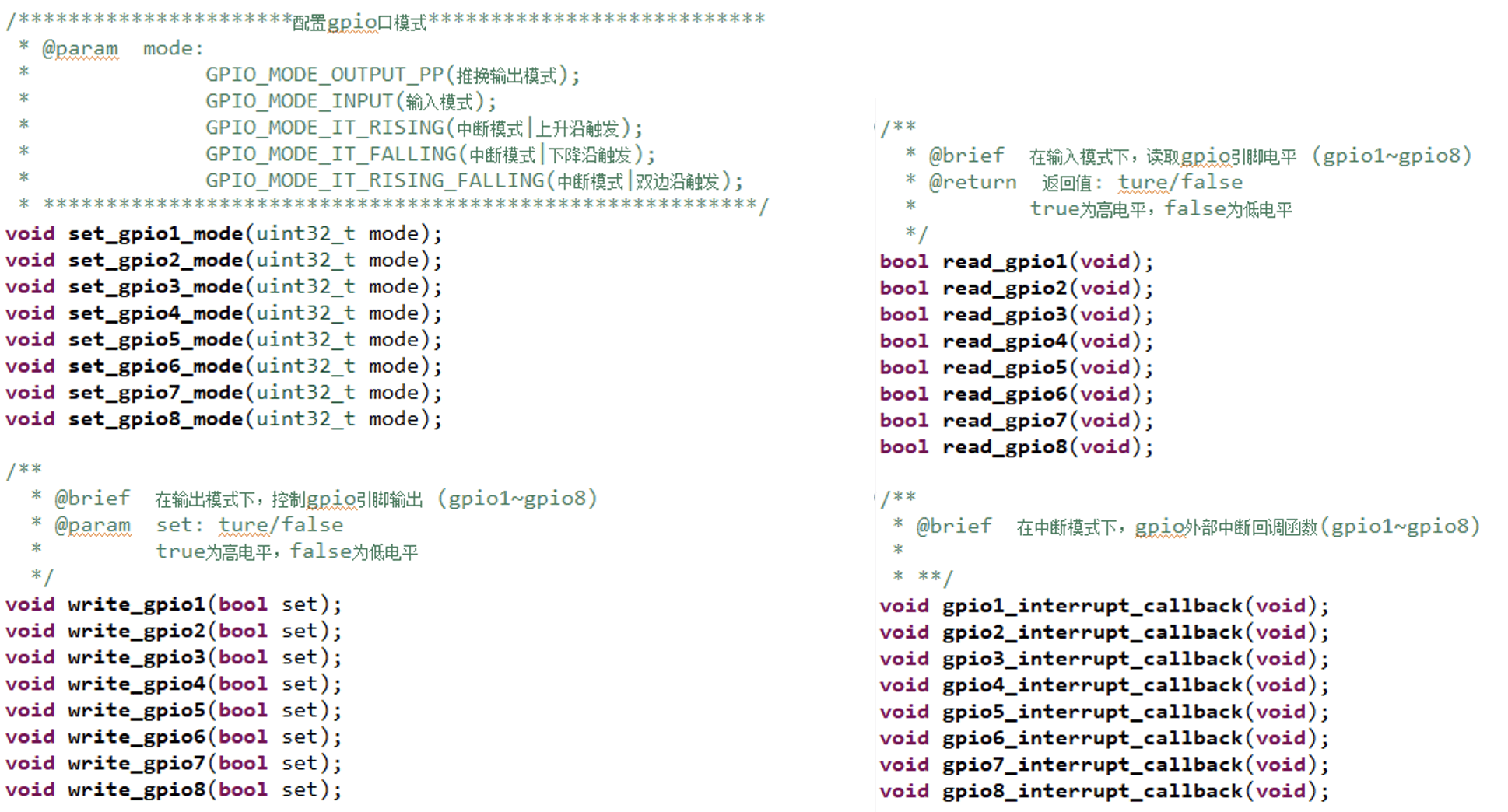
GPIO驱动函数在Clibrary/include/hal.h中,可以直接调用。如下图所示:
• SD卡
1、SD卡日志记录函数
函数在Cpplibrary/include/sdlog/sdlog.h中,可以直接调用,如下图所示:

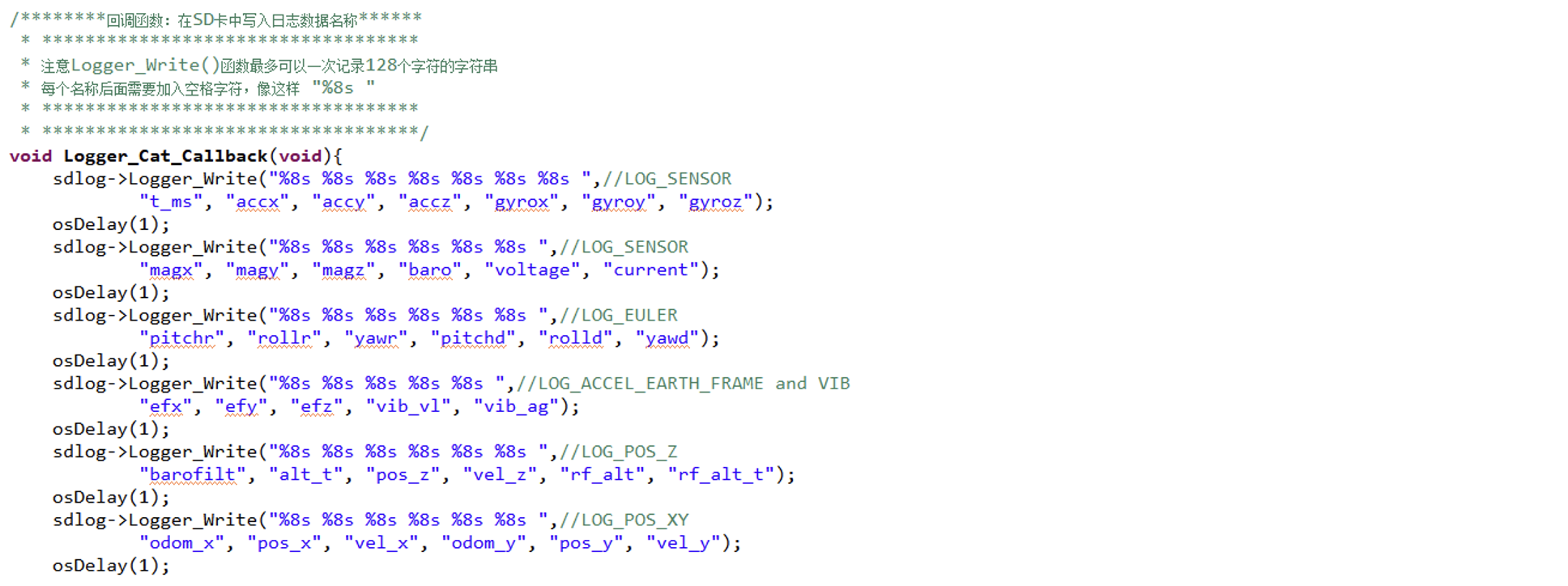
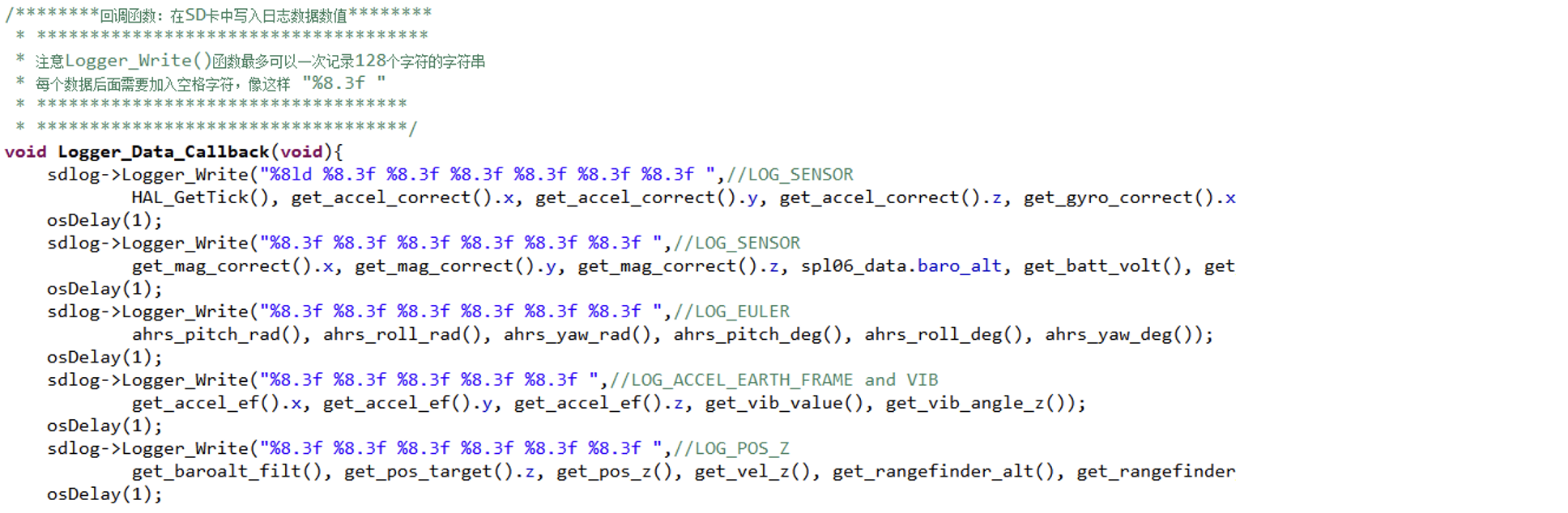
2、调用demo
调用demo在Maincontroller/src/maincontroller.cpp中,使用时可以增加新的日志,如下图所示。其中,上方为日志数据的名称,下方为日志数据的内容。两者代码格式一致,可以参照例程添加新的日志代码。在添加新的数据时,注意名称和内容在顺序上需要一一对应,并且在写入一段日志后,一定要延时1ms再写入下一段日志。
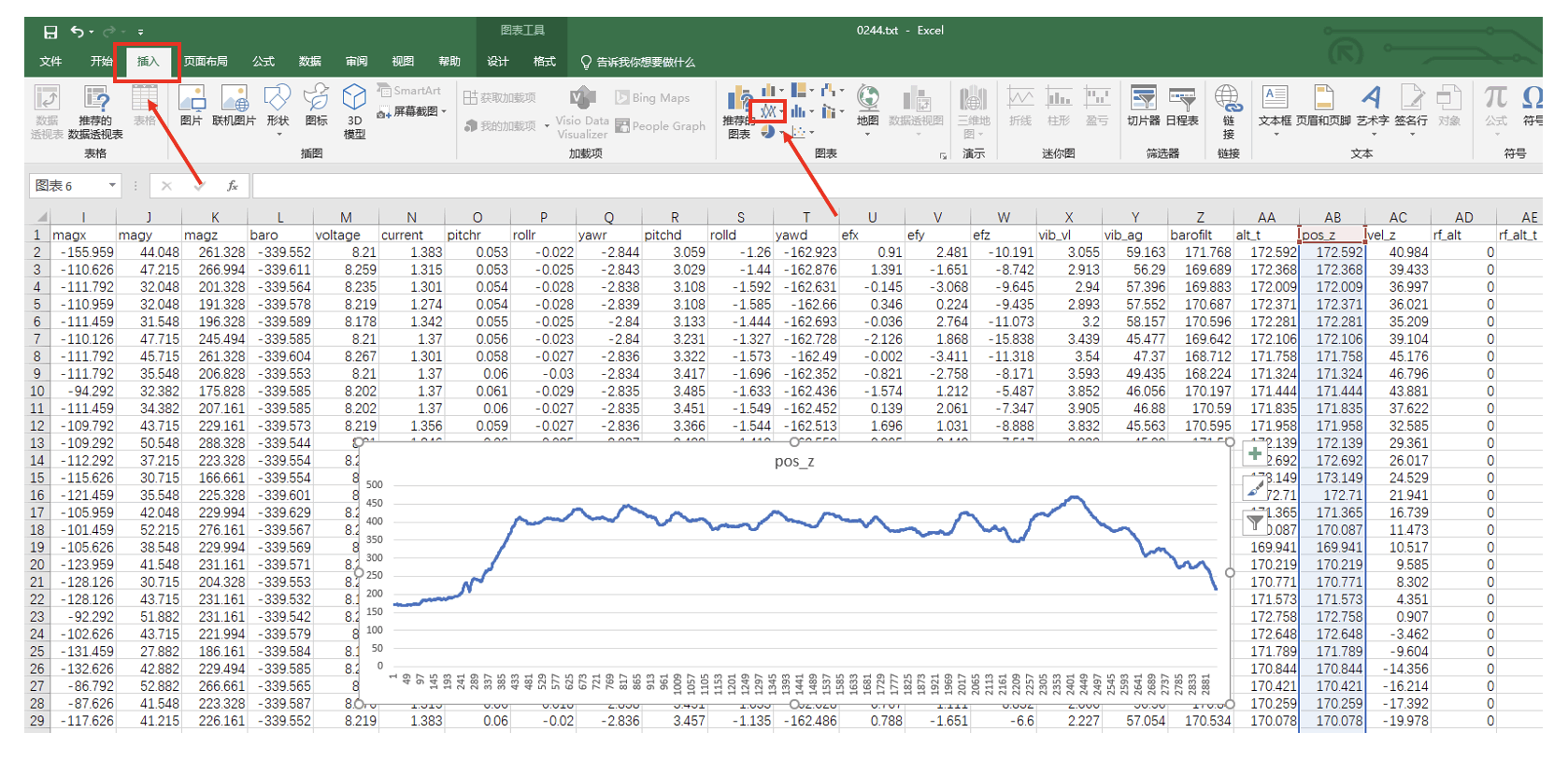
3、SD卡日志查看
请参照SD卡日志查看指南。